Download
1 / 52
700 likes | 1.35k Vues
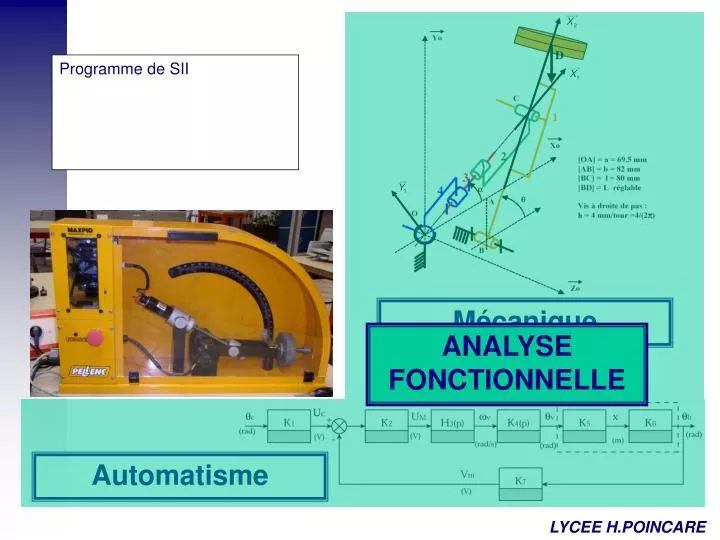
Programme de SII. ANALYSE FONCTIONNELLE. D. 1. 2. 3. 4. Mécanique. Automatisme. Mécanique. D. 1. 2. 3. 4. Schéma cinématique paramétré. L 3/4. 4. 3. L 2/3. L 4/0. 2. 0. 1. L 1/2. L 0/1. Graphe des liaisons. D. 1. 2. 3. 4. Mécanique. Modélisation. L 3/4. 4. 3.

E N D
Programme de SII ANALYSE FONCTIONNELLE D 1 2 3 4 Mécanique Automatisme
Mécanique D 1 2 3 4
Schéma cinématique paramétré L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 Graphe des liaisons D 1 2 3 4 Mécanique Modélisation
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 D 1 2 3 4 Mécanique Cinématique • Cinématique analytique: Calcul position, vitesse et accélération d’un point d’un solide. • Fermeture chaîne de solide;géométrique et cinématique. • Cinématique graphique: Pour Pb plan; calcul de la vitesse d’un point d’un solide dans une position donnée.
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 Mécanique Cinématique: analytique Définition des torseurs cinématiques des liaisons: L0/1 :Liaison pivot d’axe (B, ).
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 Mécanique Cinématique: composition des mouvements
Mécanique Cinématique: dérivation vectorielle est le vecteur taux de rotation de R1 par rapport à R0. Ce vecteur est parallèle à l’axe de rotation et a pour norme la vitesse de rotation angulaire, orienté dans le sens direct. Il s’exprime en [rad/s]
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 4 2 3 B C 0 1 A O Mécanique Cinématique: chaînes de solide
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 4 2 3 B C 0 1 A O Mécanique Cinématique: chaînes de solide
Mécanique Exemple de détermination du CIR et d’utilisation : échelle glissant le long d’un mur. Déterminer le CIR du mouvement de 2/1
Déterminer graphiquement Mécanique Exemple de détermination du CIR et d’utilisation : échelle glissant le long d’un mur.
Mécanique Exemple de détermination du CIR et d’utilisation : échelle glissant le long d’un mur.
Mécanique Equiprojectivité
Mécanique Equiprojectivité
Mécanique Equiprojectivité
Mécanique Equiprojectivité
Mécanique Equiprojectivité
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 D 1 2 3 4 Mécanique Statique • Modélisation des actions mécaniques. • PFS. • Frottement. • Statique Graphique.
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 Mécanique Statique: modélisation des A.M • Actions Mécaniques de contact: exemple des liaisons. • Actions Mécaniques à distance: le poids.
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 D 1 2 3 4 Mécanique Statique: PFS • On isole un solide. • Bilan des AMs ( de contact et à distance) • Application du PFS en un point du solide • Résolution.
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 D 1 2 3 4 Mécanique Statique: PFS Cm résistant à la charge en fonction de θ
Loi de Coulomb Mécanique Statique: frottement
Loi de Coulomb Mécanique Statique: frottement Coulomb a montré qu’un bon modèle de comportement en frottement sec est donné par les lois suivantes : Pour l'adhérence : Pour le frottement: et
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 D 1 2 3 4 Mécanique Statique: Graphique Cm résistant à la charge en fonction de θ
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 D 1 2 3 4 Mécanique Hyperstatisme
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 D 1 2 3 4 Mécanique Dynamique • Torseur Cinétique; Torseur Dynamique. • Matrice d’inertie. • PFD. • Théorème de l’énergie cinétique ( notion d’inertie équivalente).
Mécanique Dynamique • Torseur Cinétique; Torseur Dynamique. • Matrice d’inertie.
Mécanique Dynamique • Torseur Cinétique; Torseur Dynamique. • Matrice d’inertie.
Mécanique Dynamique • Torseur Cinétique; Torseur Dynamique. • Matrice d’inertie.
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 D 1 2 3 4 Mécanique Dynamique • Torseur Cinétique; Torseur Dynamique. • Matrice d’inertie. • PFD. • Théorème de l’énergie cinétique ( notion d’inertie équivalente). • Calculer le Cm en phase de montée
L3/4 4 3 L2/3 L4/0 2 0 1 L1/2 L0/1 D 1 2 3 4 Mécanique Dynamique • Torseur Cinétique; Torseur Dynamique. • Matrice d’inertie. • PFD. • Théorème de l’énergie cinétique ( notion d’inertie équivalente).
Mécanique Dynamique Théorème de l’énergie cinétique.
Automatisme Systèmes Linéaires Continus et Invariants. • Modélisation;Transformées de Laplace • Réponse Temporelle (1er et 2nd ordres) • Réponse Fréquentielle (1er et 2nd ordres + ordre n par décomposition) • Précision ( Calcul d’écarts: erreur statique, erreur de traînage,..) • Stabilité ( Critère algébrique FTBF, Critères graphiques FTBO, Marges de stabilité ) • Correction ( Proportionnelle, Proportionnelle Intégrale, effets des correcteurs)
Automatisme Systèmes Logiques. • Combinatoires: algèbre de Boole, Equations Logiques, Simplification par tableau de Karnaugh, Représentation par logigramme et schémas à contacts. • Séquentielles: Chronogramme;Grafcet.
ANALYSE FONCTIONNELLE D 1 2 3 4 Mécanique Automatisme
Analyse fonctionnelle d’un système Deux outils: FAST SADT
Analyse fonctionnelle d’un système • F.A.S.T. Le FAST est un graphe décomposant une fonction de service (à gauche) en fonction technique et pouvant aboutir aux solutions techniques élémentaires (à droite).
- « Pourquoi » cette fonction doit-elle être assurée ? Quand ? Pourquoi ? Comment? - « Comment » cette fonctiondoit-elle être réalisée ? Fonction - « Quand » cette fonctiondoit-elle être assurée ? Quand ? Comment ? F. Principale 1 F. globale F. Principale 2 Ordre chronologique F. Principale 3 Analyse fonctionnelle d’un système La lecture et l’écriture d’un F.A.S.T sont basées sur la réponse aux trois questions suivantes • F.A.S.T
- « Pourquoi » cette fonction doit-elle être assurée ? Quand ? Quand ? Pourquoi ? Pourquoi ? Comment? Comment? - « Comment » cette fonctiondoit-elle être réalisée ? Fonction Fonction Quand ? - « Quand » cette fonctiondoit-elle être assurée ? Quand ? F. Principale 1 F. globale Comment ? F. Composante 2.1 Ordre chronologique F. Composante 2.2 F. Composante 2.3 F. Principale 3 Analyse fonctionnelle d’un système La lecture et l’écriture d’un F.A.S.T sont basées sur la réponse aux trois questions suivantes • F.A.S.T F. Principale 2
- « Pourquoi » cette fonction doit-elle être assurée ? Quand ? Quand ? Pourquoi ? Pourquoi ? Comment? Comment? - « Comment » cette fonctiondoit-elle être réalisée ? Fonction Quand ? - « Quand » cette fonctiondoit-elle être assurée ? Quand ? F. Principale 1 F. Composante 1.1 F. Composante 1.2 Pourquoi ? F. Composante 2.1 Pourquoi ? F. Composante 2.3 F. Principale 3 F. Composante 3.1 Analyse fonctionnelle d’un système La lecture et l’écriture d’un F.A.S.T sont basées sur la réponse aux trois questions suivantes • F.A.S.T F. globale F. Principale 2 F. Composante 2.2
- « Pourquoi » cette fonction doit-elle être assurée ? Quand ? Quand ? Pourquoi ? Pourquoi ? Comment? Comment? - « Comment » cette fonctiondoit-elle être réalisée ? Fonction Quand ? - « Quand » cette fonctiondoit-elle être assurée ? Quand ? F. Principale 1 F. Composante 1.1 F. Composante 1.2 Pourquoi ? F. Composante 2.1 Pourquoi ? F. Composante 2.3 F. Principale 3 F. Composante 3.1 Analyse fonctionnelle d’un système La lecture et l’écriture d’un F.A.S.T sont basées sur la réponse aux trois questions suivantes • F.A.S.T Solution 1.1 F. globale Solution 1.2 Solution 2.1 F. Principale 2 Solution 2.2 F. Composante 2.2 Solution 2.3 Solution 3.1
Analyse fonctionnelle d’un système Illustration Ariane Proposer un fast décomposant la fonction principale jusqu’aux solutions élémentaires.
Analyse fonctionnelle d’un système • S.A.D.T. Outre la description fonctionnelle (commune au FAST), le SADT rajoute une approche structurelle en proposant une schématique des liensentre les composants internes et donc entre les fonctions techniques associées. C : Configuration R : Réglages E : Exploitation W : Energie
Analyse fonctionnelle d’un système • S.A.D.T. La fonction globale est progressivement détailléepar niveaux successifs (analyse descendante).
A-0 Contrôles Sortie 1 Fonction globale Entrée Sortie 2 Moyen 1 Moyen 2 Analyse fonctionnelle d’un système • S.A.D.T. La fonction globale est progressivement détailléepar niveaux successifs (analyse descendante).
A0 F.P. 1 F.P. 2 F.P. 3 Analyse fonctionnelle d’un système • S.A.D.T. La fonction globale est progressivement détailléepar niveaux successifs (analyse descendante). A-0 Contrôles Sortie 1 Fonction globale Entrée Sortie 2 Moyen 1 Moyen 2
F.P. 2.1 F.P. 2.2 A2 Analyse fonctionnelle d’un système • S.A.D.T. La fonction globale est progressivement détailléepar niveaux successifs (analyse descendante). A-0 Contrôles Sortie 1 Fonction globale Entrée Sortie 2 Moyen 1 Moyen 2 A0 F.P. 1 F.P. 2 F.P. 3
Analyse fonctionnelle d’un système • S.A.D.T. A-0 Contrôles La fonction globale est progressivement détailléepar niveaux successifs (analyse descendante). Sortie 1 Fonction globale Entrée Sortie 2 Moyen 1 Moyen 2 A0 F.P. 1 F.P. 2 F.P. 3 F.P. 1.1 F.P. 2.1 F.P. 1.2 F.P. 2.2 A1 A2
Analyse fonctionnelle d’un système Illustration Ariane • Proposer un SADT A-0 du système • Proposer un SADT A0 du système