Download
1 / 31
310 likes | 479 Vues
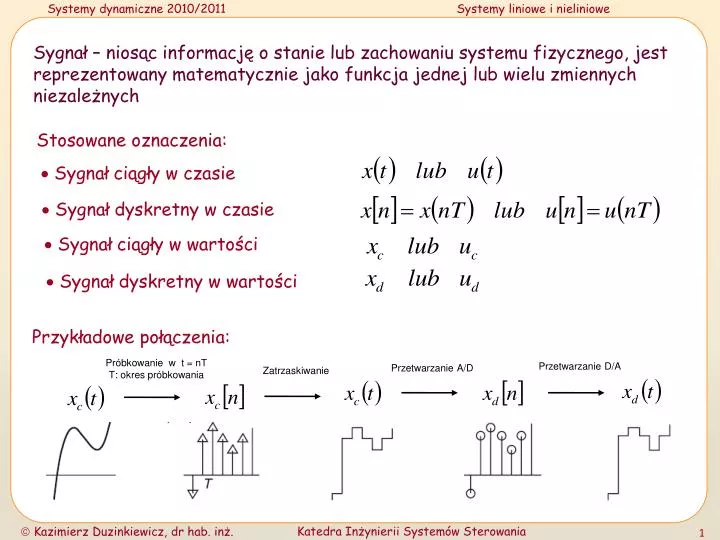
Sygnał – niosąc informację o stanie lub zachowaniu systemu fizycznego, jest reprezentowany matematycznie jako funkcja jednej lub wielu zmiennych niezależnych. Stosowane oznaczenia:. Sygnał ciągły w czasie. Sygnał dyskretny w czasie. Sygnał ciągły w wartości.

E N D
Sygnał – niosąc informację o stanie lub zachowaniu systemu fizycznego, jest reprezentowany matematycznie jako funkcja jednej lub wielu zmiennych niezależnych Stosowane oznaczenia: Sygnał ciągły w czasie Sygnał dyskretny w czasie Sygnał ciągły w wartości Sygnał dyskretny w wartości Przykładowe połączenia: Próbkowanie w t = nT T: okres próbkowania Przetwarzanie D/A Przetwarzanie A/D Zatrzaskiwanie
! Będziemy pomijać efekt kwantyzacji przetwarzania analogowo – cyfrowego i stosowali zamiennie określenia sygnał/system dyskretny i sygnał system cyfrowy
Elementarne sygnały analogowe i cyfrowe Funkcja skoku jednostkowego Sekwencja skoku jednostkowego także: Funkcja skoku opóźnionego i skalowanego Sekwencja skoku opóźnionego i skalowanego
Funkcja impulsu jednostkowego Sekwencja impulsu jednostkowego także: Funkcja impulsu opóźnionego i skalowanego Sekwencja impulsu opóźnionego i skalowanego
Zależności: - pomiędzy [n] i uS[n] - pomiędzy (t) i uS(t)
Funkcja impulsu prostokątnego Sekwencja impulsu prostokątnego
Funkcja impulsu trójkątnego Sekwencja impulsu trójkątnego
Funkcja eksponencjalna rzeczywista Sekwencja eksponencjalna rzeczywista
Funkcja sinusoidalna rzeczywista Sekwencja sinusoidalna rzeczywista
System jest obiektem lub procesem, który wytwarza odpowiedź nazywaną wyjściem w odpowiedzi na wymuszenie nazywane wejściem Najbardziej ogólnie: System może być opisany za pomocą pewnego operatora skalarnego O lub wektorowego O, który wiąże wektor sygnału wejściowego u(t) z wektorem sygnału wyjściowego y(t) Będziemy rozróżniali: Wejście Wejście Wyjście Wyjście O O System ciągły System dyskretny
Przykłady Zmienne: poziom cieczy natężenie dopływu cieczy natężenie wypływu cieczy prędkość wypływu Parametry: pole przekroju przekrój wypływu przyśpieszenie grawitacyjne Model matematyczny: Prawa fizyki: System nieliniowy
Zmienne: Parametry: Model matematyczny: Prawa fizyki: System liniowy
Systemy liniowe i nieliniowe (Linear and Nonlinear systems) Mówimy, że system jest liniowy jeżeli spełnia on zasadę superpozycji, to znaczy, że posiada on następujące właściwości: Jednorodność: Wyjście systemu pobudzanego pojedynczym wejściem u(t) wzmocnionym w stopniu a jest wzmocnionym w takim samym stopniu wyjściem systemu odpowiadającym wejściu u(t)
Addytywność: Wyjście systemu pobudzanego przez sumę wejść jest taką samą sumą jego wyjść obserwowanych dla każdego z tych wejść oddzielnie
Praktyczne wskazówki: Na nieliniowość wskazują jakiekolwiek niezerowe stałe w opisie systemu jakiekolwiek nieliniowe wyrażenia związane z sygnałami takie np. jak x2(t) x(t)y(t) i pochodnymi sygnałów ciągłych czasu w równaniu różniczkowym lub różnicowym Przykłady: Systemy dyskretne: Systemy ciągłe: Liniowe Nieliniowe
Łącznie zasada superpozycji Systemy ciągłe: Jeżeli dla wejścia systemu wyjście systemu jest to dla wejścia systemu wyjście systemu jest to znaczy
Systemy dyskretne: Jeżeli dla wejścia systemu wyjście systemu jest to dla wejścia systemu wyjście systemu jest to znaczy
Przykład - system ciągły dynamiczny Mając system dynamiczny opisany równaniem różniczkowym określić, czy jest on liniowy dla zerowych warunków początkowych
a) Niech: y1(t) wyjście systemu dla wejścia u1(t), a y2(t) wyjście systemu dla wejścia u2(t) Zatem: oraz
Dla systemu liniowego, dla wejścia wyjście jest Podstawiając do równania systemu otrzymamy System jest liniowy
b) Niech: y1(t) wyjście systemu dla wejścia u1(t), a y2(t) wyjście systemu dla wejścia u2(t) Zatem: oraz
Dla systemu liniowego, dla wejścia wyjście jest Podstawiając do równania systemu otrzymamy System jest nieliniowy
Systemy dyskretne dynamiczne: Mając system dynamiczny opisany równaniem różnicowym określić, czy jest on liniowy Sprawdzić osąd dla wejść oraz obliczając cztery pierwsze wartości wyjść Przyjąć warunek początkowy
a) Niezerowy składnik stały sugeruje nieliniowość – można zastosować metodę kontrprzykładu, tzn. pokazać jeden przykład, kiedy zasada superpozycji nie jest spełniona dla systemu Spróbujemy pokazać najpierw ogólnie, że system jest nieliniowy Niech: y1[n] wyjście systemu dla wejścia u1[n], a y2[n] wyjście systemu dla wejścia u2[n] Zatem dla wejścia Dla wejścia wyjście wyjście Kombinacja liniowa wyjść y1[n] i y2[n] dla wejść u1[n] i u2[n] wyniesie
Dla systemu liniowego, dla kombinacji liniowej wejść u1[n] i u2[n] wyjście powinno wynosić zatem Otrzymaliśmy poprzednio System jest nieliniowy
Sprawdzimy nasz osąd na przykładzie Iteracyjnie policzymy cztery pierwsze wartości wyjść Dla sygnału u1[n] Dla sygnału u2[n] czyli czyli Kombinacja liniowa sygnałów wyjścia
Odpowiedź systemu na podaną kombinację liniową sygnałów wejściowych wyniesie czyli zatem Otrzymaliśmy poprzednio System jest nieliniowy
b) Dla wejścia Dla wejścia wyjście będzie wynosić wyjście będzie wynosić zatem Dla wejścia wyjście powinno wynosić zatem System jest liniowy
Sprawdzimy nasz osąd na przykładzie Iteracyjnie policzymy cztery pierwsze wartości wyjść Dla sygnału u1[n] Dla sygnału u2[n] czyli czyli Kombinacja liniowa sygnałów wyjścia
Odpowiedź systemu na podaną kombinację liniową sygnałów wejściowych czyli zatem Otrzymaliśmy poprzednio System jest liniowy