Download

1 / 11
120 likes | 453 Vues
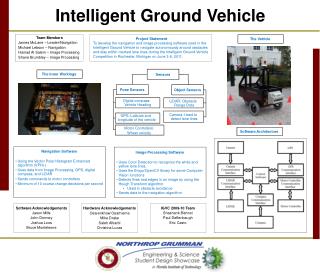
IGVC (Intelligent Ground Vehicle Competition) By: John Dormoy jdormoy@fit.edu Faculty Sponsor: Dr. Marius Silaghi msilaghi@fit.edu Milestone 2 Steering Program Accelerating Program Reverse Program Move Program Progress for Milestone 2 turnLeft () Parameters: angle heading and degrees

E N D
IGVC(Intelligent Ground Vehicle Competition) By: John Dormoy jdormoy@fit.edu Faculty Sponsor: Dr. Marius Silaghi msilaghi@fit.edu
Milestone 2 • Steering Program • Accelerating Program • Reverse Program • Move Program
turnLeft() Parameters: angle heading and degrees It turns the robot counter-clockwise.
turnRight() Parameters: angle heading and degrees It turns the robot clockwise.
accelerate() Parameters: x component, y component, angle heading, and acceleration rate It accelerates the robot forwards.
reverse() Parameters: x component, y component, angle heading, and acceleration rate It accelerates the robot backwards.
move() Parameters: initial x component, initial y component, angle heading, final x component, and final y component It moves the robot from the initial components to the final components.