Download
1 / 12
120 likes | 245 Vues
Christian Washington, Mohan Sridharan, Shiqi Zhang Computer Engineering, Louisiana State University Computer Science, Texas Tech University

E N D
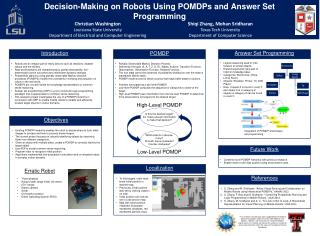
Christian Washington, Mohan Sridharan, Shiqi Zhang Computer Engineering, Louisiana State University Computer Science, Texas Tech University Disclaimer: This research is supported by NSF Grant No. CNS 1005212. Opinions, findings, conclusions, or recommendations expressed in this paper are those of the author(s) and do not necessarily reflect the views of NSF. Decision-making on Robots Using POMDPs
Why Robotics? • Mobile robots have become a major part of today’s society • Military • Medicine • Search and Exploration • Many research problems • Autonomous control • Simultaneous Localization and Mapping(SLAM) [4]
The Problem • Real world domains can present complex problems • Partial Observability • Non-deterministic action outcomes • Unforeseen changes • Sensors mounted on robots can provide a lot of data • How to process this data efficiently?
The Solution • Markov Decision Process • Given states, actions, transition probabilities, reward function • Want to maximize future expected reward (policy) • State of the system always known • Partially Observable Markov Decision Process(POMDP) • State of system is uncertain • Maintain a belief state: Probability Distribution over the state
Hierarchical POMDPs • Hierarchy creates layers • High-level POMDP • Where to look • Intermediate-level POMDP • What to process • Low-level POMDP • How to process [1]
Logical Inference + Probabilistic Planning • Combine answer set programming and POMDPs [2]
Research Platform • Erratic Robot • Three wheeled • Hokuyo UTM-30LX laser range finder • Stereo camera • Sonar • On-board processor • Robot Operating System (ROS) [4]
Summer Objectives • Make target localization on robot more time efficient • Model uncertainty • In robot position using multiple hypothesis of target object location • In target location using hypothesis of own position
Research Methods • Using POMDPs and Answer Set Programming • Revise algorithms • Change parameters • Run physical experiments on robot • Target localization • Path planning
Current Status • Running tests using BRIEF image recognition software • Solving smaller problems using POMDPs • Programming the robot to travel to a specified destination, then return to its original location
References • Shiqi Zhang and Mohan Sridharan. Active Visual Sensing and Collaboration on Mobile Robots using Hierarchical POMDPs. In the International Conference on Autonomous Agents and Multiagent Systems (AAMAS 2012), Valencia, Spain, June 4-8, 2012. • Shiqi Zhang, Forrest Sheng Bao and Mohan Sridharan. (Student abstract) Combining Probabilistic Planning and Logic Programming on Mobile Robots. In the International Conference on Artificial Intelligence (AAAI 2012), Toronto, Canada, July 22-26, 2012. • Shiqi Zhang, Mohan Sridharan and Xiang Li. To Look or Not to Look: A Hierarchical Representation for Visual Planning on Mobile Robots. In the International Conference on Robotics and Automation (ICRA 2011), Shanghai, China, May 9-13, 2011. • http://www.cs.ttu.edu/~smohan/Research.html