Download
1 / 1
10 likes | 115 Vues
ADAPTIVE DUAL AK-D TREE SEARCH ALGORITHM FOR ICP REGISTRATION APPLICATIONS. Jiann-Der Lee * , Shih-Sen Hsieh * , Chung-Hsien Huang * , Li-Chang Liu * , Chien-Tsai Wu ^ ” , Jyi-Feng Chen ^ ” , and Shin-Tseng Lee ^ ” *Department of Electrical Engineering, Chang Gung University, Tao-Yuan, Taiwan

E N D
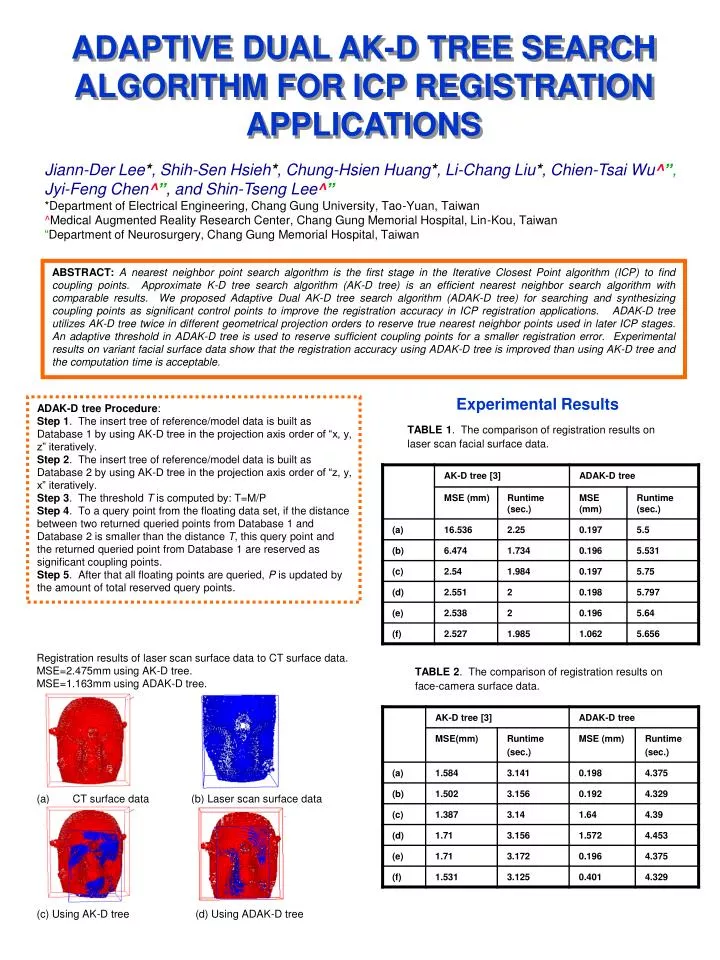
ADAPTIVE DUAL AK-D TREE SEARCH ALGORITHM FOR ICP REGISTRATION APPLICATIONS Jiann-Der Lee*, Shih-Sen Hsieh*, Chung-Hsien Huang*, Li-Chang Liu*, Chien-Tsai Wu^”, Jyi-Feng Chen^”, and Shin-Tseng Lee^” *Department of Electrical Engineering, Chang Gung University, Tao-Yuan, Taiwan ^Medical Augmented Reality Research Center, Chang Gung Memorial Hospital, Lin-Kou, Taiwan “Department of Neurosurgery, Chang Gung Memorial Hospital, Taiwan ABSTRACT: A nearest neighbor point search algorithm is the first stage in the Iterative Closest Point algorithm (ICP) to find coupling points. Approximate K-D tree search algorithm (AK-D tree) is an efficient nearest neighbor search algorithm with comparable results. We proposed Adaptive Dual AK-D tree search algorithm (ADAK-D tree) for searching and synthesizing coupling points as significant control points to improve the registration accuracy in ICP registration applications. ADAK-D tree utilizes AK-D tree twice in different geometrical projection orders to reserve true nearest neighbor points used in later ICP stages. An adaptive threshold in ADAK-D tree is used to reserve sufficient coupling points for a smaller registration error. Experimental results on variant facial surface data show that the registration accuracy using ADAK-D tree is improved than using AK-D tree and the computation time is acceptable. Experimental Results ADAK-D tree Procedure: Step 1. The insert tree of reference/model data is built as Database 1 by using AK-D tree in the projection axis order of “x, y, z” iteratively. Step 2. The insert tree of reference/model data is built as Database 2 by using AK-D tree in the projection axis order of “z, y, x” iteratively. Step 3. The threshold T is computed by: T=M/P Step 4. To a query point from the floating data set, if the distance between two returned queried points from Database 1 and Database 2 is smaller than the distance T, this query point and the returned queried point from Database 1 are reserved as significant coupling points. Step 5. After that all floating points are queried, P is updated by the amount of total reserved query points. TABLE 1. The comparison of registration results on laser scan facial surface data. • Registration results of laser scan surface data to CT surface data. • MSE=2.475mm using AK-D tree. • MSE=1.163mm using ADAK-D tree. • CT surface data (b) Laser scan surface data • (c) Using AK-D tree (d) Using ADAK-D tree TABLE 2. The comparison of registration results on face-camera surface data.