Download
1 / 7
200 likes | 875 Vues
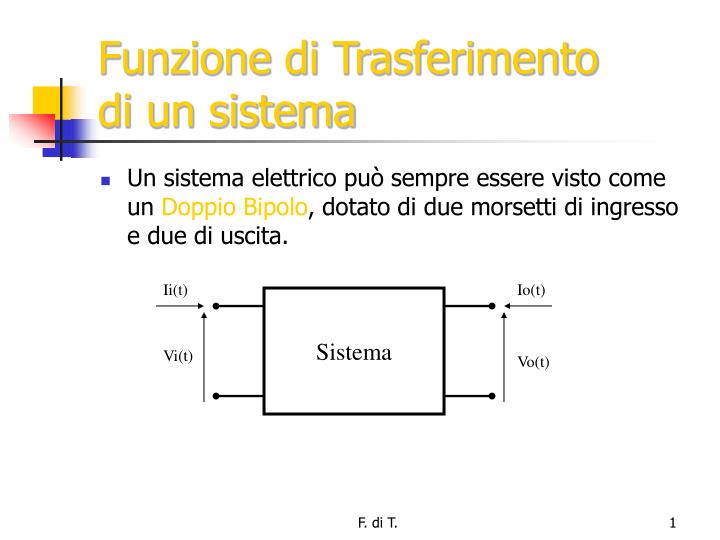
Funzione di Trasferimento di un sistema. Un sistema elettrico può sempre essere visto come un Doppio Bipolo , dotato di due morsetti di ingresso e due di uscita. Ii(t). Io(t). Sistema. Vi(t). Vo(t). Ii (s). Sistema. Io (s). Passando al sistema L-trasformato si avrà:. Vi (s). Vo (s).

E N D
Funzione di Trasferimento di un sistema • Un sistema elettrico può sempre essere visto come un Doppio Bipolo, dotato di due morsetti di ingresso e due di uscita. Ii(t) Io(t) Sistema Vi(t) Vo(t) F. di T.
Ii(s) Sistema Io(s) Passando al sistema L-trasformato si avrà: Vi(s) Vo(s) Supponendo di considerare le tensioni : Vi(s) rappresenta l’eccitazione di ingresso Vo(s) la risposta del sistema a quella eccitazione. F. di T.
Definizione di Funzione di Trasferimento Per il quadripolo considerato si potrà scrivere: Vo(s) = A(s) Vi(s) Dove A(s) è detta Funzione di Trasferimento (F.d.T.) del quadripolo. Definizione: “La F.d.T. è il rapporto fra la risposta (uscita) e l’eccitazione (ingresso) del sistema, espresse tramite la trasformata di Laplace.” F. di T.
La F.d.T. è una grandezza definita nel dominio della L-trasformata, quindi occorre sempre trasformare la rete, prima di calcolare la sua F.d.T. Se i bipoli hanno condizioni iniziali nulle si devono operare queste sostituzioni, prima di eseguire calcoli. Ricorda le regole di trasformazione: F. di T.
Struttura della F. di T. Nel caso più comune e generale una F.di T. è rappresentata da una funzione razionale fratta a coefficienti reali: Con mn Scomponendo in fattori i polinomi N(s) e D(s) si ottiene: Con k = am/bn Importante: Le radici zi del polinomio N(s) sono dette ZERI della F. di T. Le radici pi del polinomio D(s) sono dette POLI della F.di T. F. di T.
Poli e Zeri della F.d.T. Dalla matematica sappiamo che le radici di polinomi possono essere soltanto Reali (ad es. X1= 3) o Complesse coniugate ( ad es. coppie del tipo X1,2= 2 j3). Queste soluzioni possono essere rappresentate su di un piano complesso s = + j, detto piano di Gauss. Per convenzione si indicano gli zeri con un cerchietto (O) ed i poli con una crocetta (X). j Coppia poli Complex coniug Coppia Zeri complex coniug x o x o o Zero nell’origine Polo reale Zero reale o x F. di T.
Stabilità di una F.di T. Poiché dalla tabelle delle Trasformate di Laplace si ricava che Si deduce che la risposta nel tempo del sistema dovuta ad un polo sarà stabile solo se il polo è a parte reale negativa: solo in questo caso, infatti l’esponenziale non diverge. • N.B.: • Una rete lineare si dice Stabile se ad una qualsiasi eccitazione di ampiezza limitata, fornisce una risposta anch’essa limitata. • Una rete passiva è per sua natura implicitamente stabile • Una rete attiva può essere o diventare instabile a certe frequenze di lavoro • Una rete si dice “Fisicamente realizzabile” se il numero dei poli risulta maggiore o al più uguale a quello degli zeri F. di T.