Download
1 / 11
120 likes | 291 Vues
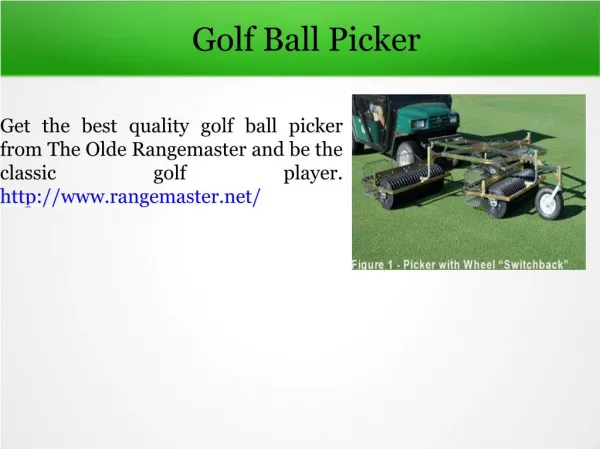
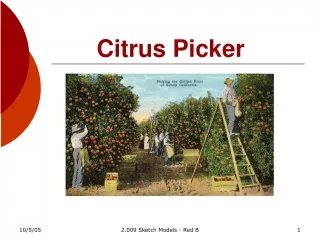
Dr. Fruit-picker. Silas Harris Michael Forrest Tsjellum van der Stok. Background. Farmers are seeking to save money by utilizing robots to harvest crops, as opposed to manual labor. There are currently several varieties of fruit picking robots, however they are all expensive. . Problem.

E N D
Dr. Fruit-picker Silas Harris Michael Forrest Tsjellum van der Stok
Background • Farmers are seeking to save money by utilizing robots to harvest crops, as opposed to manual labor. • There are currently several varieties of fruit picking robots, however they are all expensive.
Problem • Green and red balloons are hung from a 2’ X 3’ peg board. Only the red balloons are “ripe” and may be picked.
Solution • Our Proposed Solution: • A vertical X-Y robot. A simple rotating scoop will pluck the balloon from the peg board, depositing the balloon into a container.
System Overview Y-direction stepper motor Color Detector, consisting of an LED and a photoresisitor Rapid prototyped balloon scoop Delrin carriage 80/20 Extruded aluminum carriage rails Acme threaded rods X-direction stepper motor
State Diagram Scoop_timer==0 Color_red==1 Color_red==0 Right_limit==1 Right_limit==0 Y_limit==1 Y_counter==1 Left_limit==1
Concepts of Subsystems • Keep it simple • X/Y Acme screw linear movement • Color sensor • Scoop/Chute
Areas of Responsibility Silas Harris • Solidworks/Conceptual Design/GDT • Stress Analysis Michael Forrest • Electrical Engineering • Component Specs Tsjellum van der Stok • Software • C Programming • Logic Analysis
Not Included • Placing balloons in specific spots • Incapable of picking balloons from floor level pegboard • Methodical picking algorithm that will check each possible position yielding slow picking speed