Download
1 / 25
250 likes | 408 Vues
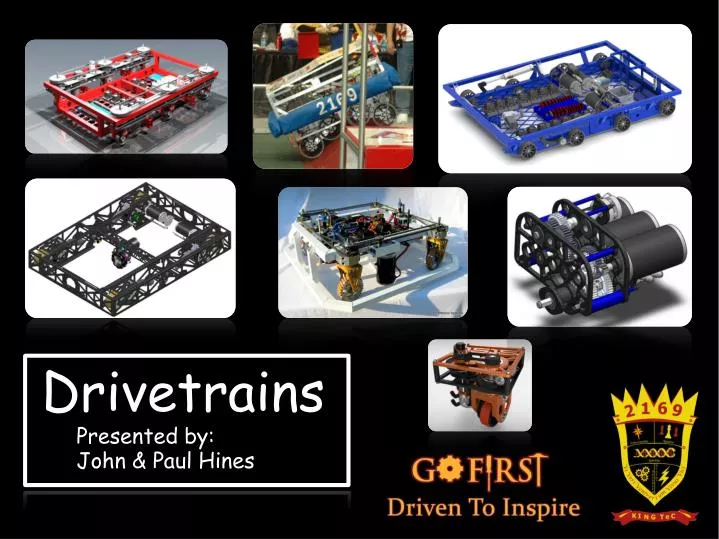
1 Drivetrains Presented by: John & Paul Hines. Purpose of this Presentation. Drivetrain Selection Types of drivetrains Types of wheels Drivetrain mechanics Best drivetrain for your team Maintenance . Ideal Drivetrain.

E N D
Purpose of this Presentation • Drivetrain Selection • Types of drivetrains • Types of wheels • Drivetrain mechanics • Best drivetrain for your team • Maintenance
Ideal Drivetrain • Gets your robot where it needs to be, when it needs to be there • Is robust and reliable • Can push/pull objects and other robots • Meets your strategy goals • Fits with the game • Can be built with your resources • Rarely needs maintenance • Can be fixed quickly
Basics • Know your resources • Decide after kickoff: • Speed, power, shifting, mobility • Use the most powerful motors on drivetrain • Don’t drive ½ of your robot… WEIGH IT DOWN! • Break it early • Give software team TIME to work • Give drivers TIME to drive
Wheel Types: Traction Standard wheels with varying amounts of traction, stength and weight AndyMark Plaction VEX Pro AndyMark Pneumatic AndyMark KOP
Wheel Type: Holomonic Special Wheels that allow the robot to achieve Holomonic motion Omni Mecanum Crab Module
Drivetrain Types: 2 Wheel Drive Driven Wheel Motor(s) Motor(s) + Easy to design + Easy to build + Light weight + Inexpensive + Agile - Not much power - Will not do well on ramps - Easily turned Caster, Omni, Slide
Drivetrain Types: 4 Wheel Drive 2 Gearboxes Driven Wheels Motor(s) Motor(s) + Easy to design + Easy to build + Inexpensive + Powerful + Sturdy and stable - Not agile - Turning is difficult Chain or belt Driven Wheels
Drivetrain Types: 4 Wheel Drive 4 Gearboxes Drive Wheels Motor(s) Motor(s) + Easy to design + Easy to build + Powerful + Sturdy and stable + Many options: Mecanum, traction - Heavy - Costly Drive Wheels Motor(s) Motor(s)
Drivetrain Types: 6 Wheel Drive 2 Gearboxes • Check out 1114’s Kitbot on Steroids • Simbotics.org • Resources • Kitbot en esteroides + Easy to design + Easy to build + Powerful + Stable + Agile* This is very common in FRC + simple + easy + fast and powerful + agile Gearbox Gearbox • *2 ways to be agile • Lower contact point on center wheel • Omni wheels on front or back or both - Heavy ** - Expensive ** ** - depending on wheel type
Drivetrain Types: Tank Treads 2 Gearboxes Gearbox Gearbox + Powerful + VERY Stable - NOT AGILE - HEAVY - Inefficient - EXPENSIVE - Hard to maintain Sole benefit: Ability to go over things For turning, lower the contact point on center of track wheel Will NOT push more than a well-controlled 6wd
Tank vs. Holomonic • Tank Drive • 2 Degrees of Freedom • Rotation • Forward-back Motion • Holomonic Drive • 3 Degrees of Freedom • Rotation • Forward-back Motion • Side-side Motion
Drivetrain Type: Killough 4 wheel drive or 3 wheel drive + Immediate Turning + Simple Control – 4 wheel independent - No brake - Minimal pushing power - Jittery ride, unless w/ dualies - Incline difficulty
Drivetrain Type: Mecanum + Simple mechanisms+ Immediate turn+ Simple control – 4 wheel independent- Minimal brake - Minimal pushing power - Should have a suspension - Difficulty on inclines
Team 1346 Mechanum Drive http://www.youtube.com/watch?v=xgTJcm9EVnE
Drivetrain Type: Crab/Swerve > Each wheel rotates to steer + High-traction wheels + No friction losses in wheel-floor interface + Ability to push or hold position + Simple wheels - Complex system to control and program - Mechanical and control issues - Difficult to drive - Wheel turning delay
368’s Crab Drive in 2010 http://www.youtube.com/watch?v=q9uck-wRa_8
Drivetrain Top Speeds • Game dependent • Determined by wheel size and gear ratios • Controllable top speed: 15 ft/sec • Average 1-speed rate: 9 ft/sec • Good pushing speed: 4-5 ft/sec
Center of Gravity (CG) • Robot mass is represented at one point • Mobility increases when Cg is low and centered • High parts = light weight • Low parts = heavy (within reason) Which is more Stable? ME!
Gearboxes/Transmissions • Gear ratio determines top speed and motor load • Single Speed and Shifting options • CIMple Box shipped in 2011 KOP • 1 or 2 CIMs per gearbox • 2011 4 CIMs allowed • Must be greased to reduce friction
Belts + Don’t Stretch + Can reach far - Need to buy in custom sizes
#25 + Lightweight + Easy to install + Smaller - Easy to derail - "Steches" over time #35 + Allows for slop + Minimal "stretching" + Heavy duty applications - More weight Chain Selection
Working with Chains • Tensioning • Critical to keep robot from throwing chains • Must be accessible and easily adjustable • Does not need to be used on ALL chains but should be on drive systems
Look at other Designs! • Competitions • chiefdelphi.com • Team websites • YouTube • thebluealliance.com
Presented by: Paul Hines John Hines Drive Types + Wheel Pictures www.AndyMark.com (FRC Supplier) Swerve Drive Revolution Custom Frame www.team221.com (FRC Supplier) Check out 1114’s Kitbot on Steroids • Simbotics.org • Resources • Kitbot en esteroides