Download
1 / 45
450 likes | 626 Vues
Intermediate Representations. CS 671 February 12, 2008. Last Time. The compiler must generate code to handle issues that arise at run time Representation of various data types Procedure linkage Storage organization. Activation Records. A procedure is a control abstraction

E N D
Intermediate Representations CS 671 February 12, 2008
Last Time • The compiler must generate code to handle issues that arise at run time • Representation of various data types • Procedure linkage • Storage organization
Activation Records • A procedure is a control abstraction • it associates a name with a chunk of code • that piece of code is regarded in terms of its purpose and not of its implementation • A procedure creates its own name space • It can declare local variables • Local declarations may hide non-local ones • Local names cannot be seen from outside
Handling Control Abstractions • Generated code must be able to • preserve current state • save variables that cannot be saved in registers • save specific register values • establish procedure environment on entry • map actual to formal parameters • create storage for locals • restore previous state on exit • This can be modeled with a stack • Allocate a memory block for each activation • Maintain a stack of such blocks • This mechanism can handle recursion
Activation Records • Keeps track of the bottom of the current activation record • g(…) • { • f(a1,…,an); • } • g is the caller • f is the callee … Arg n … Arg 2 Arg 1 Ret Address g’s frame fp Local vars Temporaries Saved regs Arg m … Arg 1 Ret Address f’s frame sp next frame
Activation Records • Handling nested procedures • We must keep a static link (vs. dynamic link) • Registers vs. memory • Assume infinite registers (for now) • g(…) { • f(a1,…,an); • } • If g saves before call, restores after call caller-save register • If f saves before using a reg, restores after callee-save register
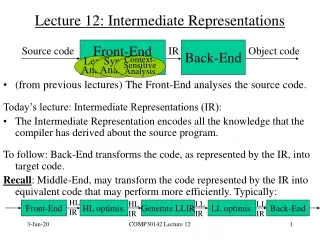
Intermediate Code Generation • Source code • lexical errors Lexical Analysis • tokens • syntax errors Syntactic Analysis • AST • semantic errors Semantic Analysis • AST’ Intermediate Code Gen • IR
And Then? The Back End • IR Trace Formation Instruction Selection Register Allocation * phase ordering problem Optimizations *
IR Motivation • What we have so far... • An abstract syntax tree • With all the program information • Known to be correct • Well-typed • Nothing missing • No ambiguities • What we need... • Something “Executable” • Closer to actual machine level of abstraction
Why an Intermediate Representation? • • What is the IR used for? • Portability • Optimization • Component interface • Program understanding • • Compiler • Front enddoes lexical analysis, parsing, semantic analysis, translation to IR • Back enddoes optimization of IR, translation to machine instructions • • Try to keep machine dependences out of IR for as long as possible
optimize x86 AST IR PowerPC Alpha Intermediate Code • • Abstract machine code – (Intermediate Representation) • • Allows machine-independent code generation, optimization
Intermediate Representations • • Any representation between the AST and ASM • 3 address code: triples, quads (low-level) • Expression trees (high-level) MEM + a[i]; MEM BINOP i CONST a MUL W
What Makes a Good IR? • • Easy to translate from AST • • Easy to translate to assembly • • Narrow interface: small number of node types (instructions) • Easy to optimize • Easy to retarget AST (>40 node types) IR (~15 node types) x86 (>200 opcodes)
IR selection • Using an existing IR • cost savings due to reuse • it must be expressive and appropriate for the compiler operations • Designing an IR • decide how close to machine code it should be • decide how expressive it should be • decide its structure • consider combining different kinds of IRs
Optimizing Compilers • • Goal: get program closer to machine code without losing information needed to do useful optimizations • • Need multiple IR stages opt x86 (LIR) optimize optimize opt AST HIR MIR PowerPC (LIR) opt Alpha (LIR)
High-Level IR (HIR) • used early in the process • usually converted to lower form later on • Preserves high-level language constructs • structured flow, variables, methods • Allows high-level optimizations based on properties of source language (e.g. inlining, reuse of constant variables) • Example: AST
Medium-Level IR (MIR) • • Try to reflect the range of features in the source language in a language-independent way • • Intermediate between AST and assembly • • Unstructured jumps, registers, memory locations • • Convenient for translation to high-quality machine code • • OtherMIRs: • tree IR: easy to generate, easy to do reasonable instruction selection • quadruples: a = b OP c (easy to optimize) • stack machine based (like Java bytecode)
Low-Level IR (LIR) • • Assembly code + extra pseudo instructions • • Machine dependent • • Translation to assembly code is trivial • • Allows optimization of code for low-level considerations: scheduling, memory layout
IR Classification: Level i := op1 if step < 0 goto L2 L1: if i > op2 goto L3 instructions i := i + step goto L1 L2: if i < op2 goto L3 instructions i := i + step goto L2 L3: for i := op1 to op2 step op3 instructions endfor High-level Medium-level
IR Classification: Structure • Graphical • Trees, graphs • Not easy to rearrange • Large structures • Linear • Looks like pseudocode • Easy to rearrange • Hybrid • Combine graphical and linear IRs • Example: • low-level linear IR for basic blocks, and • graph to represent flow of control
Graphical IRs • Abstract syntax tree • High-level • Useful for source-level information • Retains syntactic structure • Common uses • source-to-source translation • semantic analysis • syntax-directed editors
Graphical IRs • Tree, for basic block* • root: operator • up to two children: operands • can be combined • Uses: • algebraic simplifications • may generate locally optimal code. gt, t2 add, t1 0 L1: i := 2 t1:= i+1 t2 := t1>0 if t2 goto L1 assgn, i add, t1 gt, t2 assgn, i 1 2 i 1 t1 0 2 *straight-line code with no branches or branch targets.
Graphical IRs • Directed Acyclic Graphs (DAGs) • Like compressed trees • leaves: variables, constants available on entry • internal nodes: operators • annotated with variable names • distinct left/right children • Used for basic blocks (DAGs don't show control flow) • Can generate efficient code • Note: DAGs encode common expressions • But difficult to transform • Good for analysis
Graphical IRs • Control-Flow Graphs (CFGs) • Each node corresponds to a • basic block, or • part of a basic block, or • may need to determine facts at specific points within BB • a single statement • more space and time • Each edge represents flow of control
Control-Flow Graphs • Graphical representation of runtime control-flow paths • Nodes of graph: basic blocks (straight-line computations) • Edges of graph: flows of control • Useful for collecting information about computation • Detect loops, remove redundant computations, register allocation, instruction scheduling… • Alternative CFG: Each node contains a single stmt i =0; …… i = 0 while (i < 50) { t1 = b * 2; a = a + t1; i = i + 1; } …. if I < 50 t1 := b * 2; a := a + t1; i = i + 1; ……
Graphical IRs: Often Use Basic Blocks • Basic block = a sequence of consecutive statements in which flow of control enters at the beginning and leaves at the end without halt or possibility of branching except at the end • Partitioning a sequence of statements into BBs • Determine leaders (first statements of BBs) • The first statement is a leader • The target of a conditional is a leader • A statement following a branch is a leader • For each leader, its basic block consists of the leader and all the statements up to but not including the next leader.
Basic Blocks unsigned int fibonacci (unsigned int n) { unsigned int f0, f1, f2; f0 = 0; f1 = 1; if (n <= 1) return n; for (int i=2; i<=n; i++) { f2 = f0+f1; f0 = f1; f1 = f2; } return f2; } read(n) f0 := 0 f1 := 1 if n<=1 goto L0 i := 2 L2: if i<=n goto L1 return f2 L1: f2 := f0+f1 f0 := f1 f1 := f2 i := i+1 go to L2 L0: return n
Basic Blocks entry Leaders: read(n) f0 := 0 f1 := 1 if n<=1 goto L0 i := 2 L2: if i<=n goto L1 return f2 L1: f2 := f0+f1 f0 := f1 f1 := f2 i := i+1 go to L2 L0: return n read(n) f0 := 0 f1 := 1 n <= 1 return n i := 2 i<=n f2 := f0+f1 f0 := f1 f1 := f2 i := i+1 return f2 exit
Graphical IRs • Dependence graphs : they represents constraints on the sequencing of operations • Dependence: a relation between two statements that puts a constraint on their execution order • Control dependence: Based on the program's control flow • Data dependence: Based on the flow of data between statements • Nodes represent statements • Edges represent dependences • Built for specific optimizations, then discarded
s4 s1 s2 s3 s5 Graphical IRs • Dependence graphs • Example: control dependence: s3 and s4 are executed only when a<=10 true or flow dependence: s2 uses a value defined in s1 This is read-after-write dependence s1 a := b + c s2 if a>10 goto L1 s3 d := b * e s4 e := d + 1 s5 L1: d := e / 2 antidependence: s4 defines a value used in s3 This is write-after-read dependence output dependence: s5 defines a value also defined in s3 This is write-after-write dependence input dependence: s5 uses a value also uses in s3 This is read-after-read situation. It places no constraints in the execution order, but is used in some optimizations.
IR Classification: Structure • Graphical • Trees, graphs • Not easy to rearrange • Large structures • Linear • Seq of instructions that execute in order of appearance • Control flow is represented by cond branches and jumps • Hybrid • Combine graphical and linear IRs • Example: • low-level linear IR for basic blocks, and • graph to represent flow of control
Linear IR • Lower level IR before final code generation • A linear sequence of instructions • Resemble assembly code for an abstract machine • Explicit conditional branches and goto jumps • Reflect instruction sets of the target machine • Stack-machine code and three-address code • Implemented as a collection (table or list) of tuples Stack-machine code two-address code three-address code Push 2 Push y Multiply Push x subtract MOV 2 => t1 MOV y => t2 MULT t2 => t1 MOV x => t4 SUB t1 => t4 t1 := 2 t2 := y t3 := t1*t2 t4 := x t5 := t4-t3 Linear IR for x – 2 * y
Linear IRs • Stack machine code • Assumes presence of operand stack • Useful for stack architectures, JVM • Operations typically pop operands and push results • Advantages • Easy code generation • Compact form • Disadvantages • Difficult to rearrange • Difficult to reuse expressions
Stack-Machine Code • Also called one-address code • Assumes an operand stack • Operations take operands from the stack and push results back onto the stack • Compact, simple to generate and execute • Most operands do not need names • Results are transitory unless explicitly moved to memory • Used as IR for Smalltalk and Java Push 2 Push y Multiply Push x subtract Stack-machine code for x – 2 * y
Linear IR: Three-Address Code • Each instruction is of the form • x := y op z • y and zcan be only registers or constants • Just like assembly • Common form of intermediate code • The AST expression x + y * z is translated as t1 := y * z t2 := x + t1 • Each subexpression has a “home”
Three-Address Code • • Result, operand, operand, operator • x := y op z, where op is a binary operator and x, y, z can be variables, constants or compiler generated temporaries (intermediate results) • • Can write this as a shorthand • <op, arg1, arg2, result > -- quadruples • Statements • Assignment x := y op z • Copy stmts x := y • Goto L
Three Address Code • • Statements (cont) • if x relop y goto L • Indexed assignments x := y[j] or s[j] := z • Address and pointer assignments (for C) • x := &y • x := *p • *x := y • Parm x; • call p, n; • return y;
Three-Address Code • Every instruction manipulates at most two operands and one result. • Arithmetic operations: x := y op z | x := op y • Data movement: x := y [z] | x[z] := y | x := y • Control flow: if y op z goto x | goto x • Function call: param x | return y | call foo • Reasonably compact; reuse of names and values t1 := 2 t2 := y t3 := t1*t2 t4 := x t5 := t4-t3 Three-address code for x – 2 * y
Storing Three-Address Code • Store all instructions in a quadruple table • Every instr has four fields: op, arg1, arg2, result • Label of instructions index of instruction in table Quadruple entries 3AC t1 := - c t2 := b * t1 t3 := -c t4 := b * t3 t5 := t2 + t4 a := t5
Bigger Example • Consider the AST t1 := - c t2 := b * t1 t3 := - c t4 := b * t3 t5 := t2 + t4 a := t5
The IR Machine • A machine with • Infinite number of temporaries (think registers) • Simple instructions • 3-operands • Branching • Calls with simple calling convention • Simple code structure • Array of instructions • Labels to define targets of branches
Temporaries • The machine has an infinite number of temporaries • Call them t0, t1, t2, .... • Temporaries can hold values of any type • The type of the temporary is derived from the generation • Temporaries go out of scope with each function
Mapping Names to Variables • Variables are names for values • Names given by programmers in the input program • Names given by compilers for storing intermediate results of computation • Reusing temp variables can save space, but mask context and prevent analysis and optimizations • Result of t1*t2 is no longer available after t1 is reused Three-address code for x – 2 * y t1 := 2 t2 := y t1 := t1*t2 t2 := x t1 := t2-t1 t1 := 2 t2 := y t3 := t1*t2 t4 := x t5 := t4-t3 Different values reuse the same name Different values use distinct names
Mapping Storage to Variables • Variables are placeholders for values • Every variable must have location to store its value • Register, stack, heap, static storage • Values must be loaded into registers before use x and y are in registers x and y are in memory t1 := 2 t2 := y t3 := t1*t2 t4 := x t5 := t4-t3 t1 := 2 t2 := t1*y t3 := x-t2 Three-address code for x – 2 * y: void A(int b, int *p) { int a, d; a = 3; d = foo(a); *p =b+d; } Which vars can be kept in registers? Which vars must be stored in memory?
Summary • IRs provide the interface between the front and back ends of the compiler • Graphical, linear, hybrid • Should be machine and language independent • Should be amenable to optimization