Download
1 / 15

E N D
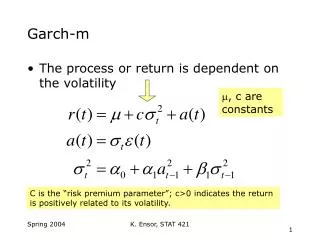
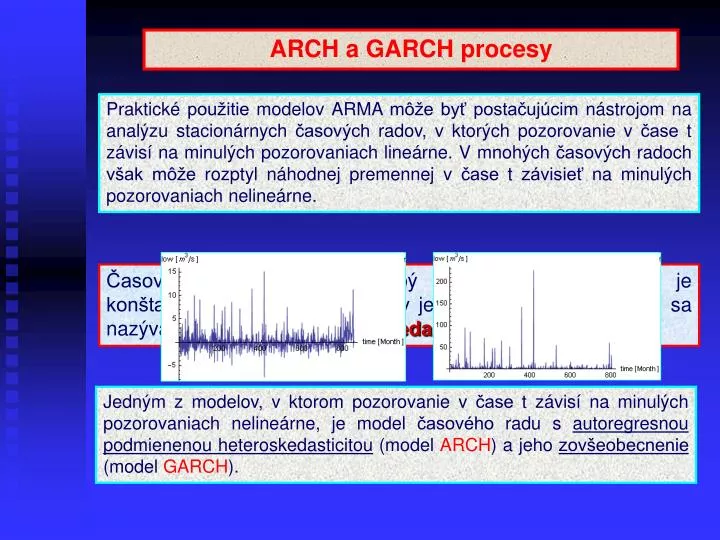
ARCH a GARCH procesy Praktické použitie modelov ARMA môže byť postačujúcim nástrojom na analýzu stacionárnych časových radov, v ktorých pozorovanie v čase t závisí na minulých pozorovaniach lineárne. V mnohých časových radoch však môže rozptyl náhodnej premennej v čase t závisieť na minulých pozorovaniach nelineárne. Časové rady, ktorých dlhodobý (nepodmienený) rozptyl je konštantný, ale sú obdobia, kedy je rozptyl relatívne vysoký, sa nazývajú podmienene heteroskedastické. Jedným z modelov, v ktorom pozorovanie v čase t závisí na minulých pozorovaniach nelineárne, je model časového radu s autoregresnou podmienenou heteroskedasticitou (model ARCH) a jeho zovšeobecnenie (model GARCH).
Stochastický proces {Xt}, pre ktorý platí: cov(Xt, Xs) = t, s (-, +) sa nazýva náhodný proces s homoskedasticitou. Stochastický proces {Xt}, pre ktorý platí: cov(Xt, Xs) = t, s (-, +) (t. j. rozptyl D(Xt) je funkcia času), sa nazýva náhodný proces s heteroskedasticitou.
Nech je časový radxt vyjadrený v tvare: xt = E[xt | t-1] + ut kde t-1je informačnámnožinaobsahujúca všetky relevantné informácieaž do času t-1 (vrátane), predikovateľná časť E[xt | t-1]je modelovaná lineárnymi ARMA modelmi utje nepredikovateľnáčasť s E[ut| t-1] = 0, E[ut2] = 2, E[ut2| t-1] = ht pre nezápornú funkciu ht = ht(t-1). Vhodný tvar (často používaný) na vyjadrenie ut je napr. kdetje i.i.d. (nezávislé rovnako rozdelené náhodné premenné)s nulovou strednou hodnotou E(t) = 0a jednotkovým rozptylom D(t) = 1.
Nech {ut} je časový rad s rozptylom D(ut) = 2 , ktorý môžeme vyjadriť v tvare: ut = (1) kde ht = 0 + 1 (2) a t je biely šum, nezávislý od ht – k , k 0, pre ktorý platí: E(t) = 0 D(t) = 1. Časový rad ut, spĺňajúci (1) a (2), sa nazýva časový rad s auto-regresnou podmienenou heteroskedasticitou rádu m(Auto-Regressive Conditionally Heteroskedastic) a označujeme ho ARCH(m).
Uvažujme teraz vlastnosti časového radu ut daného vzťahom (1). Ak j 0, j= 1,…,m a platí 1 + 2 + … + m 1, časový rad je kovariančne stacionárny. Pretože t je biely šum a nezávisí od ut - 1, ut - 2, …, ut - m, platia vzťahy: E(ut) = E(t) . E(ut ut – k) = E(t) . Et – k . = 0 pre k 0 t. j. prvky postupnosti ut majú nulovú strednú hodnotu a sú nekorelované. Ďalej pretože = 1 a nepodmienené rozptyly ut, ut-1, …, ut-m sú rovnaké (t. j. = 2), nepodmienenýrozptylut je 2 =
E ut ut-1, ut-2, … = E(t) . = 0 (tsú podľa predpokladu nezávislé na ut-1, ut-2, …, ut - m a E(t) = 0). Podmienenýrozptyl však už konštantný nie je. Pretože = 1, rozptyl ut, podmienený minulým vývojom ut-1, ut-2, …, je: E = 0 + 1 (3) Alternatívna forma ARCH(m) modelu pre časový rad ut (zapísaná pomo-cou AR(m) reprezentácie s nenulovou strednou hodnotou pre ) je: (4) Podmienená stredná hodnota je tiež rovná nule, t. j. kde wt je biely šum.
E(wt) = E(t2 – 1) . E(ht) = 0 cov( wt, ht ) = E(wt . ht ) – E(wt) . E(ht ) = E( wt . ht ) = = E E (wt wt – k ) = E(t2 – 1). = 0 D(wt) = = t. j. wt je skutočne biely šum, pričom veličiny wt a ht = sú nekorelované. Ak dosadíme (1) a (2) do (4), dostávame: wt = ht . (t2 – 1) (5) Ak je proces kovariančne stacionárny, potom platí
Z vyjadrenia procesu ARCH(m) v tvare (4) zároveň vidíme aj podmienky pre koeficienty i, i = 0, 1, …, m. Pretože je vždy nezáporné, (4) má zmysel len vtedy, ak pre všetky realizácie . Táto podmienka bude splnená, ak wt -0 pre 0 0 a j 0 pre j = 1,…,m. Podmienenýrozptyl wt : sa však v čase mení. Vlastnosti ľubovoľného ARCH procesu: chybová zložka wt je taká, že jej podmienená aj nepodmienená stredná hodnota je rovná nule, jednotlivé zložky nie sú korelované, ale chyby nie sú nezávislé, pretože sú spojené cez ich druhý moment. Podmienenýrozptyl sám o sebe je autoregresný proces, ústiaci do podmie-nených heteroskedastických chýb. Existuje mnoho aplikácií ARCH modelov, pretože ako časový rad ut môžeme uvažovať reziduá z AR modelov, ARMA modelov alebo štandardných regresných modelov. Teraz rozšírime naše úvahy aj na model, ktorý umožní modelovať podmienený rozptyl ako proces ARMA.
Nech ut je časový rad s rozptylom D(ut) = 2, ktorý možno vyjadriť v tvare: ut = (6) kde ht = (7) a t je biely šum nezávislý na ht – k , k 0 , pre ktorý platí: Et = 0 D(t) = 1. Časový rad ut generovaný podľa (6) a (7) sa nazýva časový rad so zovšeobecnenou autoregresnou podmienenou heteroske-dasticitourádu p, q(generalized ARCH) a označujeme ho GARCH(p, q). Pretože t je biely šum, ktorý je nezávislý na minulých realizáciách ut - i, podobne ako pri ARCH modeloch možno ukázať, že podmienená aj nepodmienená stredná hodnota ut je rovná 0 a podmienený rozptyl E = ht.
ht = +(B) (8) Model GARCH vznikol z predpokladu, že podmienený rozptyl ut je závislý od nekonečného počtu predošlých pozorovaní: kde B je operátor spätného posunu (backward shift operator) a Prirodzená myšlienka je parametrizovať (B) ako podiel dvoch polynómov konečného stupňa Ak vynásobíme (8) výrazom 1 - (B), dostaneme kde0 = (1 - 1 - … - p) .
Označmewt = - ht; r = max p, q. Ak považujeme ht za odhad , potom wt = - ht môžeme považovať za chybu tohto odhadu. Časový rad wt je biely šum, pričom veličiny wt a ht sú nekorelované (čo možno odvodiť podobne ako pri ARCH modeloch za predpokladu kovariančnej stacionárnosti ). Počítajme: Definujme j = 0 pre j p; j = 0 pre j q. Potom .
Ak je časový rad ut opísaný modelom GARCH(p, q), časový radje opísaný modelom ARMA(r, p), kde r = max p, q. Z vlastnosti ARMA procesov vyplýva, že proces je kovariančne stacionárny, ak wt má konečnýrozptyl a ak korene charakteristickej rovnice1 – (1 + 1) - … - (r + r) r = 0 ležia mimo jednotkového kruhu. To je pri splnení podmienok j 0, j 0 pre j = 1, …, r ekviva-lentné s podmienkou: Ak sú tieto podmienky splnené, časový rad je kovariančne stacionárny a pre nepodmienený rozptyl ut dostávame: Aby mala reprezentácia GARCH modelu zmysel, musí byť (7) kladný a (10) nezáporné. Táto podmienka bude splnená, ak 0 0, j 0, j 0 pre j = 1, …, r. (1 + 1) + … + (r + r) 1.
Ak je časový rad reziduí t opísaný modelom GARCH(p, q), časový rad štvorcov reziduí je opísaný modelom ARMA(r, p), kde r = max p, q.Existenciu podmienenej heteroskedasticity môžeme testovať pomocou korelogramu štvorcov reziduí, ktorý zostrojíme nasledovne: Testovanie homoskedasticity Pri praktickej analýze časového radu xt nás zaujíma, či predpoklad o výskyte heteroskedasticity nie je zbytočný, teda či model neobsahuje zbytočne veľa parametrov. Zaujíma nás test, ktorý by testoval hypotézu: H0: časový rad reziduí t je rad s homoskedasticitou. Kľúčovým znakom modelov GARCH je, že podmienený rozptyl šumovej zložky postupnosti xt sa správa ako model ARMA. Predpokladajme, že časový rad xt je ARMA proces. Potom autokorelačná funkcia a parciálna autokorelačná funkcia reziduí naznačujú, že reziduá tvoria biely šum. Autokorelačná funkcia štvorcov reziduí sa používa na identifikáciu rádu GARCH procesu.
Odhadneme najlepší ARMA model pre xt. Vypočítame reziduá t a ich štvorce . Potom vypočítame výberový rozptyl reziduí , ktorý je definovaný vzťahom Ak sú veličiny nekorelované, štatistika Q má asymptotické 2 – rozdele-nie s k-stupňami voľnosti. Zamietnutie nulovej hypotézy, že sú nekorelované, je ekvivalentné zamietnutiu nulovej hypotézy, že koeficienty GARCH modelu (10) (okrem 0 ) sú nulové. V praxi sa berie k n/4 . Vypočítame a vykreslíme výberovú autokovariančnú funkciu štvorcov rezi-duí: Na testovanie signifikantných koeficientov sa používa Ljung – Boxova Q-štatistika:
2. Vypočítame odhady reziduí a ich štvorce . Urobíme auto-regresný model pre štvorce reziduí: Formálnejší test homoskedasticity Test je založený na Lagrangeových multiplikátoroch. Umožní určiť, či je chybová zložka proces ARCH. Metodológia zahrňuje nasledujúce dva kroky: • 1.Nájdeme vhodný model AR(m): • xt = a0 + a1 xt-1 + … + am xt-m + t. Ak chybová zložka nie je proces ARCH, potom 1 = … = q = 0. Teda index determinácie R2 je pomerne malý. Ak nezamietame nulovú hypotézu (chybová zložka nie je proces ARCH), testovacia štatistika n.R2 má asymptotické 2 – rozdelenie s q-stupňami voľnosti. Ak je teda vypočítaná hodnota n.R2 väčšia ako kritická hodnota 2(q), zamietame nulovú hypotézu H0: 1 = … = q = 0, čo je ekvivalentné zamietnutiu H0, že chybová zložka nie je proces ARCH. Nulovosť koeficientov 1, …, q môžeme testovať aj t-testom významnosti regresných koeficientov.