Download
1 / 47
470 likes | 606 Vues
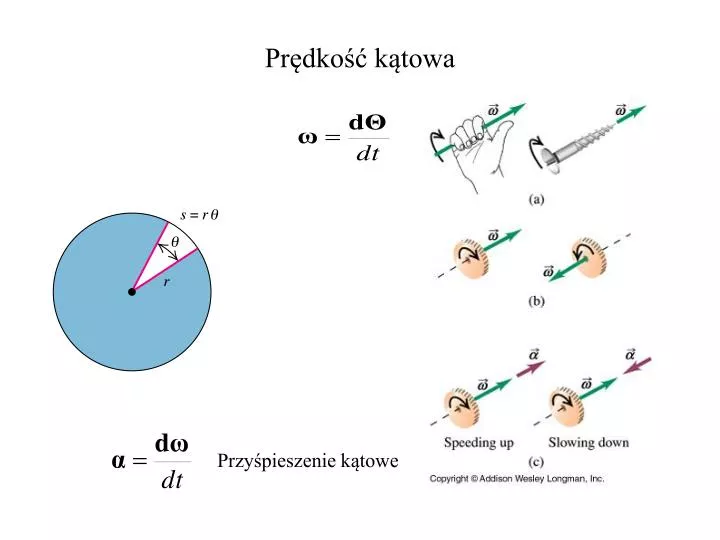
Prędkość kątowa. Przyśpieszenie kątowe. Moment siły. Moment siły. W którym przypadku moment siły jest większy?. (a) 1 (b) 2 (c) 1=2. L. F. F. L. osie. 1. 2. F r. . F. . F t. . r. r p. Moment siły. Z definicji momentu siły :. t = r F sin = r sin F = r p F.

E N D
Prędkość kątowa Przyśpieszenie kątowe
Moment siły • W którym przypadku moment siły jest większy? (a) 1 (b) 2 (c)1=2 L F F L osie 1 2
Fr F Ft r rp Moment siły Z definicji momentu siły: t= r F sin = rsin F = rpF
^ r ^ Ruch obrotowy • Załóżmy, że cząstka porusza się po okręgu. Niech na cząstkę działa siła F. Siła ta powoduje przyspieszenie styczne: • at = rZ II zasady Newtona w kierunku stycznym: Ft = mat = mr rFt = mr2 F Ft at m r
^ r ^ Ruch obrotowy rFt = mr2 ; niech Moment siły: = rFt. • Moment siły ma kierunek: • + z jeśli powoduje ruch w kierunku przeciwnym do ruchu wskazówek zegara- z w przeciwnym przypadku. F Ft at m r
Moment pędu układu punktów sztywno zamocowanych wokół osi: Rozważmy układ punktów sztywno zamocowanych w płaszczyźnie x-y , obracający się wokół osi z. Całkowity moment pędu jest sumą momentów pędu każdej cząstki: (riprostop. dovi ) v1 Ljest w kierunku z. m2 j vi = ri r2 m1 r1 i v2 r3 m3 v3 L =Iw Analog p = mv!!
Moment pędu cząstki swobodnej Moment pędu cząstki względem początku układu odniesienia Pokażemy, że moment pędu tej cząstki jest różny od zera, mimo, że cząstka nie obraca się. y x v
m Moment pędu cząstki swobodnej cd. • Rozważmy cząstkę o masie m poruszającą się wzdłuż prostej y= -d z prędkością v. Oblicz moment pędu względem (0,0)? y x d v
y x r d p=mv Moment pędu cząstki swobodnej cd. Moduł momentu pędu: ripleżą w płaszczyźniex-y , więc Lbędzie w kierunku osi z
(W inercjalnym układzie odniesienia) moment siły wypadkowej działającej na cząstkę jest równy szybkości zmian momentu pędu. II zasada dynamiki Newtona V;Zasada zachowania momentu pędu
np. Jaka jest końcowa prędkość kątowa? Początkowa Początkowy moment pędu (moduł) a ? końcowa Końcowy moment pędu b Z zasady zachowania momentu pędu ( moment sił zewnętrznych równy zero): Zagadka: Zmiana energii kinetycznej: Kto wykonał pracę?
I i II prawo Keplera dA • Moment siły grawitacji w ruchu planet wokół słońca jest równy zero a więc L=const. Ponieważ L jest prostopadły do płaszczyzny w której odbywa się ruch, to jego stałość oznacza, że ruch planety odbywa się w tej samej płaszczyźnie. Zatem tor ruchu planety jest krzywą płaską. • Prędkość polowa jest stała. L
Bryła sztywna Układ cząstek w którym odległości między cząstkami nie zmieniają się w czasie nazywa się bryłą sztywną. Dowolny ruch bryły sztywnej można traktować jako superpozycję ruchu translacyjnego (postępowego) i obrotowego. A
dm r y x Środek masy • Dla bryły sztywnej: gęstość, Dla bryły symetrycznej środek masy=środkowi symetrii
Ruch bryły sztywnej Centre of mass End of hammer 1. Ruch postępowy środka masy 2. Obrót wokół środka masy
(W inercjalnym układzie odniesienia) moment siły wypadkowej działającej na układ cząstek jest równy szybkości zmian momentu pędu: II zasada dynamiki Newtona (VI)(moment pędu układu cząstek)
Moment pędu układu punktów sztywno zamocowanych wokół osi: Rozważmy układ punktów sztywno zamocowanych w płaszczyźnie x-y , obracający się wokół osi z. Całkowity moment pędu jest sumą momentów pędu każdej cząstki: (riprostop. dovi ) v1 Ljest w kierunku z. m2 j vi = ri r2 m1 r1 i v2 r3 m3 v3 L =Iw Analog p = mv!!
w z L1 v1 r1 m1 q r1 y f w x Obrót bryły sztywnej wokół ustalonej osi 1) Rozważmy masę m1przyczepioną do pręta o długości r1, który obraca się z prędkością w wokół osi z.
moment pędu, L • pęd masy m1 :p1 = m1v1 • gdziev1 :v1= w x r1 • moment pęduL1: • L1= r1 x p1 • Składowar1prostopadła do to p1 (ido v1) • to wektorr1więc składowa • z momentu pędu, Lz1: • Lz1= r1 x p1 • Lz1 = r1x mv1 lub Lz1 = r1 x m(w x r1) • stąd w z L1 v1 r1 m1 q r1 y f w x Lz1= m r12w
Ustalona lub chwilowa oś obrotu(II ZDNewtona VIII) Przyspieszenie kątowe ciała obracającego się wokół ustalonej lub chwilowej osi obrotu jest proporcjonalne do składowej momentu sił zewnętrznych równoległej do osi obrotu.
r’ A dm ri’ mi A Moment bezwładności Układ cząstek : Ciało stałe
Osie główne • Dla bryły sztywnej zawsze można znaleźć 3 wzajemnie prostopadłe osie obrotu dla których Ljest zawsze równoległe dow: L= Iw. Są to tzw. osie główne, zaś momenty bezwładności wokół tych osi nazywają sie głównymi momentami bezwładności. • Jesli bryła sztywna jest symetryczna, to osie główne są jednocześnie osiami symetrii.np. sześcian, kula.
y dx x L np. Moment bezwładności jednorodnego pręta Obrót wokół końca L 0 Obrót wokół środka
r dr d np. Moment bezwładności jednorodnego koła 2 R 0 0
Twierdzenie Steinera I = ICM + MD2 D=L/2 M CM x L ICM IEND
R Momenty bezwładności R
R Moment bezwładności R
L Moment bezwładności L
Moment pędu i prędkość kątowa r’ W ogólności, każda składowa całkowitego momentu pędu zależy od wszystkich składowych prędkości kątowej.
Wpływ symetrii Tylko dla ciał o odpowiedniej symetrii kierunek momentu pędu pokrywa się z kierunkiem wektora prędkości kątowej jest zwany momentem bezwładności ciała przy ruchu obrotowym wokół osi
Dla symetrycznych brył sztywnych przyspieszenie kątowe jest proporcjonalne do momentu wypadkowej sił zewnętrznych. II zasada dynamiki Newtona ( VII)(dla ruchu obrotowego bryły sztywnej)
Praca w ruchu obrotowym • Praca siłyFdziałającej na ciało, które może obracać się wokół ustalonej osi. • dW = F.dr = FR d sin() = FR sin() d dW = d W po scałkowaniu: W = D • AnalogW = F •r • W < 0jeśli iDqmają przeciwne zwroty! F R dr = R d d oś
Energia kinet. ruchu obrotowego i prędkość kątowa Praca i energia kinetyczna: K = Wwyp Powyższe twierdzenie obowiązuje też dla ruchu obrotowego.Dla ciała obracającego się wokół ustalonej osi:
Praca i energia kinetyczna: • K = WwypPowyższe twierdzenie obowiązuje też dla ruchu obrotowego. • Dla ciała obracającego się wokół ustalonej osi:
W T Twierdzenie o równow. pracy i energii kinet.(całkowita energia kinet.) Całkowita praca wykonana przez wszystkie siły (zewn. i wewn.) nad układem cząstekjest równa zmianie całkowitej energii kinet. układu lub
Całkowita energia kinetyczna bryły sztywnej Jeśli środek masy jest w punkcie A:
Praca i energia • Dwa sznury są nawinięte wokół dwóch dysków o różnych promieniach ale o tym samym momencie bezwładności I. Do ich końców przyłożono taką samą siłę F która spowodowała ich odwiniecie o tę samą długość.Początkowo dyski są nieruchome ; założyć, że sznury nie ślizgają się po dyskach. • Który dysk ma większą prędkość kątową po pociągnięciu sznura? w2 w1 (a)1 (b) 2 (c)1=2 F F
PonieważI1 = I2 • w1=w2 d Praca i energia • Praca jest ta sama! • W = Fd • Więc zmiana energii kinet. będzie też taka samaW = DK. w2 w1 F F
Spadający ciężarek i krążek I • Z twierdzenia o równoważności pracy i całkowitej energii kinetycznej: • DK = Wwyp=mgL R T m v L
Spadający ciężarek i krążek I Z drugiej strony: • U =Wwyp= DK a stąd DK + U = 0 czyli E=K + U = const Ten sam wynik można zatem otrzymać korzystając z zasady zachowania energii mechanicznej: Dla ciężarka nieruchomego na wysokości y=L: E=U=mgL. Dla ciężarka na wysokości y=0: E=K=Ktransl+Kobrot zatem: Ktransl+Kobrot =mgL R T y m v L 0
Żyroskop N w Prędkość precesji