Download
1 / 32
320 likes | 459 Vues
Bag of Features Tracking. Fan Yang, Huchuan Lu School of Information and Communication Engineering Dalian University of Technology, Dalian, CHINA Yen-Wei Chen College of Information Science and Engineering Ritsumeikan University, Kusatsu, JAPAN. Goal of our work. Related algorithms.

E N D
Bag of Features Tracking Fan Yang, Huchuan Lu School of Information and Communication Engineering Dalian University of Technology, Dalian, CHINA Yen-Wei Chen College of Information Science and Engineering Ritsumeikan University, Kusatsu, JAPAN
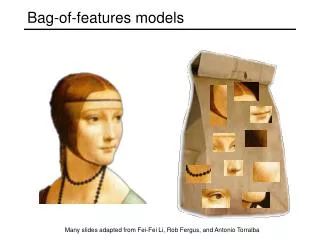
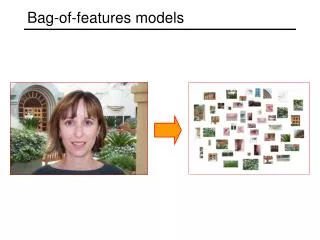
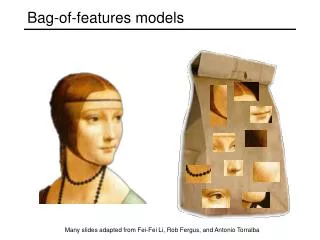
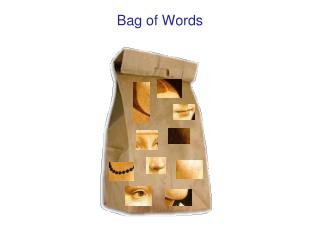
Related algorithms • Bag of Features • aims to find a set of representative features from a large dataset of images • an image is represented as the occurrence of such features • mainly used for object categorization
Bag of Features (BoF) [Fei-Fei and Perona, CVPR05]
Main contribution • we propose a visual tracking approach based on “bag of features” (BoF) algorithm which fuse patch-based approach and global template-based approach into a unified framework. • Besides, updating mechanism and result refinement scheme are included in BoF tracking. • Experiments demonstrate that our approach is robust in handling occlusion, scaling and rotation.
Overview of our approach • Patch generation • Codebook construction • Tracking • Updating • Results refinement
Overview of our approach • Patch generation • Codebook construction • Tracking • Updating • Results refinement
Patch generation Locate the object Randomly sample patches (constant size) Collection of patches
Overview of our approach • Patch generation • Codebook construction • Tracking • Updating • Results refinement
Codebook construction Accumulate training images Feature representation Clustering Formed codebook
Codebook construction Note: We utilize RGB and LBP features to construct two codebooks separately
Codebook construction We useM training frames, compute the frequency of occurrence of codewords within the tracked object region and obtain M histograms, called “bags”
Overview of our approach • Patch generation • Codebook construction • Tracking • Updating • Results refinement
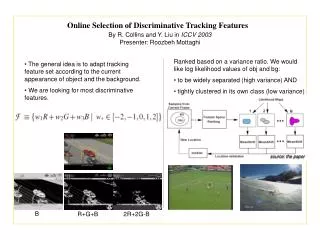
Tracking For each new frame Randomly sample T candidates (particle sampling) Collection of candidates
Tracking For each candidate (w.r.t. one codebook) sample patches extract features compute the minimum distance with Patch similarity computation
Tracking For each candidate (w.r.t. one codebook) projection to the codebook compute the minimum distance with Bag similarity computation
Tracking choose the best Using to weight and is the tracked object.
Overview of our approach • Patch generation • Codebook construction • Tracking • Updating • Results refinement
Updating • Collect p patches with highest value from the tracked object, using is predefined and constant • Repeat the above step in the following f frames to obtain patches • Perform K-means clustering again on and to get new codebook forget factor
Updating new codebook
Overview of our approach • Patch generation • Codebook construction • Tracking • Updating • Results refinement
Results refinement When the similarity of BoF tracking is below a threshold , the result of BoF tracking is inaccurate Using the current and previous affine parameter to refine and is affine parameters of previous, current affine para and refined result
Experimental results • Settings for BoF tracking • Features: 64-dim RGB and 59-dim LBP • Size of codebook: 20 • Number of sampled candidates: 300 • Number of patches in a candidate: 50 • Patch size: 12x12 pixels • Forget factor: = 0.9 • Training frames: 5 frames • Settings for comparison • IVT: 300 sampled candidates • FragTrack: 4 pixel or 5 pixel half size of search window IVT : Ross et al. Incremental learning for robust visual tracking. IJCV2007. FragTrack : Adam et al. Robust fragments-based tracking using the integral histogram. CVPR2006
Occlusion Simple occlusion Continuous occlusion
Influence of Parameters Patch size & weighting strategy Seq. / Param. 8×8 adaptive 12×12 adaptive 16×16 adaptive 20×20 adaptive 12×12 constant ShopAssistant2cor 65.03 3.36 4.02 14.84 5.28 OneStopEnter1front 5.65 4.01 5.37 9.24 4.28 occlusion1 11.23 8.23 9.31 12.10 31.78 boy 6.97 2.97 6.17 6.37 3.67 • average center location errors in pixels • “adaptive” means adaptive weight is used to combine RGB and LBP codebooks • “constant” means we use a constant weight (0.5 for both of the two codebooks)
Summary • Bag of Features Tracking (BoF Tracking) • We incorporate BoF algorithm into tracking framework with effective modification • Robust in handling occlusion, pose changes and background clutter • Our method can be easily extended by adding spatial information
Thank you! http://ice.dlut.edu.cn/lu/index.html