Download
1 / 1
220 likes | 704 Vues
References. [1] J.C. McCall, and M.M. Trivedi . Video-based lane estimation and tracking: survey , IEEE Transactions on Intelligent Transportation Systems, 7(1), 2006.

E N D
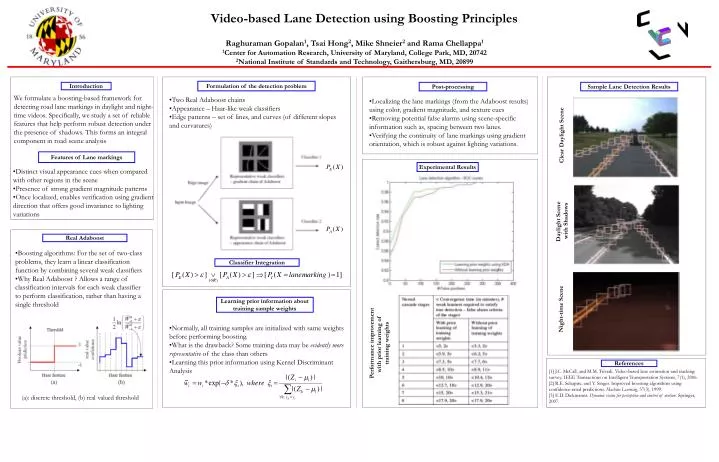
References [1] J.C. McCall, and M.M. Trivedi. Video-based lane estimation and tracking: survey, IEEE Transactions on Intelligent Transportation Systems, 7(1), 2006. [2] R.E. Schapire, and Y. Singer. Improved boosting algorithms using confidence-rated predictions. Machine Learning, 37(3), 1999. [3] E.D. Dickmanns. Dynamic vision for perception and control of motion. Springer, 2007. Video-based Lane Detection using Boosting Principles Raghuraman Gopalan1, Tsai Hong2, Mike Shneier2 and Rama Chellappa1 1Center for Automation Research, University of Maryland, College Park, MD, 20742 2National Institute of Standards and Technology, Gaithersburg, MD, 20899 Formulation of the detection problem Introduction Post-processing Sample Lane Detection Results We formulate a boosting-based framework for detecting road lane markings in daylight and night-time videos. Specifically, we study a set of reliable features that help perform robust detection under the presence of shadows. This forms an integral component in road scene analysis • Two Real Adaboost chains • Appearance – Haar-like weak classifiers • Edge patterns – set of lines, and curves (of different slopes and curvatures) • Localizing the lane markings (from the Adaboost results) using color, gradient magnitude, and texture cues • Removing potential false alarms using scene-specific information such as, spacing between two lanes. • Verifying the continuity of lane markings using gradient orientation, which is robust against lighting variations. Clear Daylight Scene Features of Lane markings Experimental Results • Distinct visual appearance cues when compared with other regions in the scene • Presence of strong gradient magnitude patterns • Once localized, enables verification using gradient direction that offers good invariance to lighting variations Daylight Scene with Shadows Real Adaboost • Boosting algorithms: For the set of two-class problems, they learn a linear classification function by combining several weak classifiers • Why Real Adaboost ? Allows a range of classification intervals for each weak classifier to perform classification, rather than having a single threshold Classifier Integration Learning prior information about training sample weights Night-time Scene • Normally, all training samples are initialized with same weights before performing boosting. • What is the drawback? Some training data may be evidently more representative of the class than others • Learning this prior information using Kernel Discriminant Analysis Performance improvement with prior learning of training weights (a): discrete threshold, (b) real valued threshold