Download
1 / 40
400 likes | 409 Vues
WORK AND ENERGY. Another equation for working kinetics problems involving particles can be derived by integrating the equation of motion ( F = m a ) with respect to displacement.

E N D
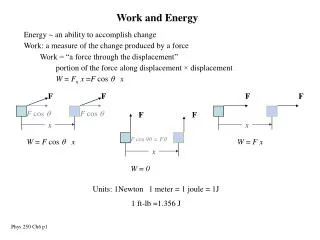
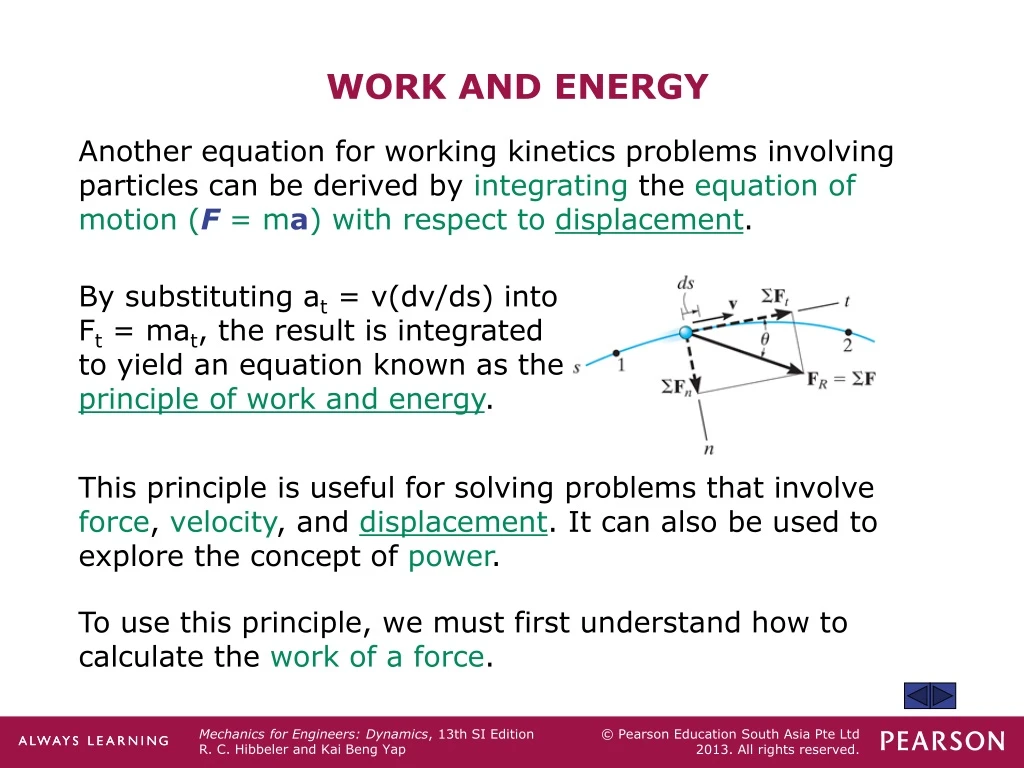
WORK AND ENERGY Another equation for working kinetics problems involving particles can be derived by integrating the equation of motion(F= ma)with respect to displacement. By substituting at = v(dv/ds) into Ft= mat, the result is integrated to yield an equation known as the principle of work and energy. This principle is useful for solving problems that involve force, velocity, anddisplacement. It can also be used to explore the concept of power. To use this principle, we must first understand how to calculate the work of a force.
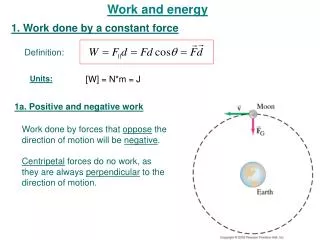
r2 ∫ r1 By using the definition of the dotproduct and integrating, the total work can be written as U1-2 = F• dr WORK OF A FORCE (Section 14.1) A force does work on a particle when the particle undergoes a displacement along the line of action of the force. Work is defined as the product of force and displacement components acting in the same direction. So, if the angle between the force and displacement vector is q , the increment of work dU done by the force is dU = F dscosq
WORK OF A FORCE (continued) If F is a function of position (a common case) this becomes s2 ∫ F cosq ds U1-2 = s1 If both F and q are constant (F = Fc), this equation further simplifies to U1-2 = Fc cosq (s2 - s1) Work is positive if the force and the movement are in the same direction. If they are opposing, then the work is negative. If the force and the displacement directions are perpendicular, the work is zero.
U1-2 = - W dy y2 ∫ U1-2 = - W (y2 − y1) = - WΔy y1 WORK OF A WEIGHT The work done by the gravitational force acting on a particle (or weight of an object) can be calculated by using The work of a weight is the product of the magnitude of the particle’s weight and its vertical displacement. If Δy is upward, the work is negative since the weight force always acts downward.
The work of the spring force moving from position s1 to position s2 is s2 s2 = ∫ = ∫ U1-2 Fs ds k s ds = 0.5 k (s2)2 – 0.5 k (s1)2 s1 s1 WORK OF A SPRING FORCE When stretched, a linear elastic spring develops a force of magnitude Fs = ks, where k is the spring stiffness and s is the displacement from the unstretched position. If a particle is attached to the spring, the force Fs exerted on the particle is opposite to that exerted on the spring. Thus, the work done on the particle by the spring force will be negativeor U1-2 = – [ 0.5 k (s2)2 – 0.5 k (s1)2 ] .
SPRING FORCES It is important to note the following about spring forces. 1. The equations above are for linear springs only! Recall that a linear spring develops a force according to F = ks (essentially the equation of a line). 2. The work of a spring is not just spring force times distance at some point, i.e., (ksi)(si). Beware, this is a trap that students often fall into! 3. Always double-check the sign of the spring work after calculating it. It is positive work if the force on the object by the spring and the movement are in the same direction.
PRINCIPLE OF WORK AND ENERGY (Section 14.2 & Section 14.3) By integrating the equation of motion, Ft = mat = mv(dv/ds), the principle of work and energy can be written as U1-2 = 0.5 m (v2)2 – 0.5 m (v1)2 or T1 + U1-2 = T2 U1-2 is the work done by all the forces acting on the particle as it moves from point 1 to point 2. Work can be either a positive or negative scalar. T1 and T2 are the kinetic energies of the particle at the initial and final position, respectively. Thus, T1 = 0.5 m (v1)2 and T2 = 0.5 m (v2)2. The kinetic energy is always a positivescalar(velocity is squared!). So, the particle’s initial kinetic energy plus the work done by all the forces acting on the particle as it moves from its initial to final position is equal to the particle’s final kinetic energy.
PRINCIPLE OF WORK AND ENERGY (continued) Note that the principle of work and energy (T1 + U1-2 = T2) is not a vector equation! Each term results in a scalar value. Both kinetic energy and work have the same units, that of energy! In the SI system, the unit for energy is called a joule (J), where 1 J = 1 N·m. In the FPS system, units are ft·lb. The principle of work and energy cannot be used, in general, to determine forces directed normal to the path, since these forces do no work. The principle of work and energy can also be applied to a system of particles by summing the kinetic energies of all particles in the system and the work due to all forces acting on the system.
WORK OF FRICTION CAUSED BY SLIDING The case of a body sliding over a rough surface merits special consideration. Consider a block which is moving over a rough surface. If the applied force P just balances the resultant frictional forcek N, a constant velocity v would be maintained. The principle of work and energy would be applied as 0.5m (v)2 + P s – (k N) s = 0.5m (v)2 This equation is satisfied if P = k N. However, we know from experience that friction generates heat, a form of energy that does not seem to be accounted for in this equation. It can be shown that the work term (k N)s represents both the external work of the friction force and the internal work that is converted into heat.
POWER AND EFFICIENCY (Section 14.4) Power is defined as the amount of work performed perunit of time. If a machine or engine performs a certain amount of work, dU, within a given time interval, dt, the power generated can be calculated as P = dU/dt Since the work can be expressed as dU = F• dr, the power can be written P = dU/dt = (F• dr)/dt = F• (dr/dt) = F• v Thus, power is a scalar defined as the product of the force and velocity components acting in the same direction.
POWER Using scalar notation, power can be written P = F•v= F v cosq where q is the angle between the force and velocity vectors. So if the velocity of a body acted on by a force F is known, the power can be determined by calculating the dot product or by multiplying force and velocity components. The unit of power in the SI system is the Watt (W) where 1 W = 1 J/s = 1 (N · m)/s.
EFFICIENCY The mechanical efficiency of a machine is the ratio of the useful power produced (output power) to the power supplied to the machine (input power) or e = (power output) /(power input) If energy input and removal occur at the same time, efficiency may also be expressed in terms of the ratio of output energy to input energy or e = (energy output) /(energy input) Machines will always have frictional forces. Since frictional forces dissipate energy, additional power will be required to overcome these forces. Consequently, the efficiency of a machine is always less than 1.
PROCEDURE FOR ANALYSIS •Find the resultant external force acting on the body causing its motion. It may be necessary to draw a free-body diagram. •Determine the velocity of the point on the body at which the force is applied. Energy methods or the equation of motion and appropriate kinematic relations, may be necessary. •Multiply the force magnitude by the component of velocity acting in the direction of F to determine the power supplied to the body (P = F v cosq). •In some cases, power may be found by calculating the work done per unit of time (P = dU/dt). •If the mechanical efficiency of a machine is known, either the power input or output can be determined.
A forceFis said to be conservative if the work done is independent of the path followed by the force acting on a particle as it moves from A to B. This also means that the work done by the forceFin a closed path (i.e., from A to B and then back to A) is zero. Thus, we say the work is conserved. z B F A ò = F d r 0 · y x CONSERVATIVE FORCE (Section 14.5) The work done by a conservative force depends only on the positions of the particle, and is independent of its velocity or acceleration.
The “conservative” potential energy of a particle/system is typically written using the potential function V. There are two major components to V commonly encountered in mechanical systems, the potential energy from gravity and the potential energy from springs or other elastic elements. Vtotal = Vgravity + Vsprings CONSERVATIVE FORCE (continued) A more rigorous definition of a conservative force makes use of a potential function (V) and partial differential calculus, as explained in the text. However, even without the use of the these more complex mathematical relationships, much can be understood and accomplished.
POTENTIAL ENERGY Potential energyis a measure of the amount of work a conservative forcewill do when a body changes position. In general, for any conservative force system, we can define the potential function (V) as a function of position. The work done by conservative forces as the particle moves equals the change in the value of the potential function (e.g., the sum of Vgravity and Vsprings). It is important to become familiar with the two types of potential energy and how to calculate their magnitudes.
The potential function (formula) for a gravitational force, e.g., weight (W = mg), is the force multiplied by its elevation from a datum. The datum can be defined at any convenient location. Vg = ± W y POTENTIAL ENERGY DUE TO GRAVITY Vg is positive if y is above the datum and negative if y is below the datum. Remember, YOU get to set the datum.
Ve (where ‘e’ denotes an elastic spring) has the distance “s” raised to a power (the result of an integration) or 1 = V k s2 2 e ELASTIC POTENTIAL ENERGY Recall that the force of an elastic spring is F = ks. It is important to realize that the potential energy of a spring, while it looks similar, is a different formula. Notice that the potential function Ve always yields positive energy.
+ = + T V T V 1 1 2 2 = Constant CONSERVATION OF ENERGY (Section 14.6) When a particle is acted upon by a system of conservative forces, the work done by these forces is conserved and the sum of kinetic energy and potential energy remains constant. In other words, as the particle moves, kinetic energy is converted to potential energy and vice versa. This principle is called the principle of conservation of energy and is expressed as T1 stands for the kinetic energy at state 1 and V1 is the potential energy function for state 1. T2 and V2 represent these energy states at state 2. Recall, the kinetic energy is defined as T = ½ mv2.
PRINCIPLE OF LINEAR IMPULSE AND MOMENTUM (Section 15.1) The next method we will consider for solving particle kinetics problems is obtained by integrating the equation of motion with respect to time. The result is referred to as the principle of impulse and momentum. It can be applied to problems involving both linear and angular motion. This principle is useful for solving problems that involve force, velocity, and time. It can also be used to analyze the mechanics of impact(taken up in a later section).
Separating variables and integrating between the limits v= v1 at t = t1 and v= v2 at t = t2 results in t2 v2 ò ò å Fdt dv = m = mv2 – mv1 t1 v1 PRINCIPLE OF LINEAR IMPULSE AND MOMENTUM (continued) The principle of linear impulse and momentum is obtained by integrating the equation of motion with respect to time. The equation of motion can be written F = m a = m (dv/dt) This equation represents the principle of linear impulse and momentum. It relates the particle’s final velocity (v2) and initial velocity (v1) and the forces acting on the particle as a function of time.
PRINCIPLE OF LINEAR IMPULSE AND MOMENTUM (continued) Linear momentum: The vector mv is called the linear momentum, denoted as L. This vector has the same direction as v. The linear momentum vector has units of (kg·m)/s or (slug·ft)/s. Linear impulse: The integral Fdt is the linear impulse, denoted I. It is a vector quantity measuring the effect of a force during its time interval of action. Iacts in the same direction as F and has units of N·s or lb·s. The impulse may be determined by direct integration. Graphically, it can be represented by the area under theforce versus timecurve. If F is constant, then I = F(t2 – t1) .
The principle of linear impulse and momentum in vector form is written as t2 ò å Fdt t1 The particle’s initial momentum plus the sum of all the impulses applied from t1 to t2 is equal to the particle’s final momentum. PRINCIPLE OF LINEAR IMPULSE AND MOMENTUM (continued) mv1 + = mv2 The two momentum diagrams indicate direction and magnitude of the particle’s initial and final momentum, mv1 and mv2. The impulse diagram is similar to a free-body diagram, but includes the time duration of the forces acting on the particle.
t2 ò m(vx)1 + Fxdt = m(vx)2 m(vy)1 + Fydt = m(vy)2 m(vz)1 + Fzdt = m(vz)2 t1 t2 ò t1 t2 ò t1 IMPULSE AND MOMENTUM: SCALAR EQUATIONS Since the principle of linear impulse and momentum is a vector equation, it can be resolved into its x, y, z component scalar equations: The scalar equations provide a convenient means for applying the principle of linear impulse and momentum once the velocity and force vectors have been resolved into x, y, z components.
PROBLEM SOLVING • Establish the x, y, z coordinate system. • Draw the particle’s free-body diagram and establish the direction of the particle’s initial and final velocities,drawing the impulse and momentum diagrams for the particle. Show the linear momenta and force impulse vectors. • Resolve the force and velocity (or impulse and momentum) vectors into their x, y, z components, and apply the principle of linear impulse and momentum using its scalar form. • Forces as functions of time must be integrated to obtain impulses. If a force is constant, its impulse is the product of the force’s magnitude and time interval over which it acts.
The linear impulse and momentum equation for this system only includes the impulse of external forces. t2 ò å + å Fi dt = å mi(vi)2 mi(vi)1 t1 PRINCIPLE OF LINEAR IMPULSE AND MOMENTUM FOR A SYSTEM OF PARTICLES (Section 15.2) For the system of particles shown, the internal forces fi between particles always occur in pairs with equal magnitude and opposite directions. Thus the internal impulses sum to zero.
MOTION OF THE CENTER OF MASS For a system of particles, we can define a “fictitious” center of mass of an aggregate particle of mass mtot, where mtot is the sum (åmi) of all the particles. This system of particles then has an aggregate velocity of vG = (åmivi) / mtot. The motion of this fictitious mass is based on motion of the center of mass for the system. The position vector rG = (åmiri) / mtotdescribes the motion of the center of mass.
CONSERVATION OF LINEAR MOMENTUM FOR A SYSTEM OF PARTICLES (Section 15.3) When the sum of external impulses acting on a system of objects is zero, the linear impulse-momentum equation simplifies to å mi(vi)1 = å mi(vi)2 This equation is referred to as the conservation of linear momentum. Conservation of linear momentum is often applied when particles collide or interact. When particles impact, only impulsive forces cause a change of linear momentum. The sledgehammer applies an impulsive force to the stake. The weight of the stake is considered negligible, or non-impulsive, as compared to the force of the sledgehammer. Also, provided the stake is driven into soft ground with little resistance, the impulse of the ground acting on the stake is considered non-impulsive.
IMPACT (Section 15.4) Impact occurs when two bodies collide during a very short time period, causing large impulsive forces to be exerted between the bodies. Common examples of impact are a hammer striking a nail or a bat striking a ball. Theline ofimpactis a line through themass centersof the colliding particles.In general, there are two types of impact: Central impact occurs when the directions of motion of the two colliding particles are along the line of impact. Oblique impact occurs when the direction of motion of one or both of the particles is at an angle to the line of impact.
vA vB Line of impact CENTRAL IMPACT Central impact happens when the velocities of the two objects are along the line of impact (recall that the line of impact is a line through the particles’ mass centers). Once the particles contact, they may deformif they are non-rigid. In any case, energy is transferred between the two particles. There are two primary equations used when solving impact problems. The textbook provides extensive detail on their derivation.
CENTRAL IMPACT (continued) In most problems, the initial velocities of the particles, (vA)1 and (vB)1, are known, and it is necessary to determine the final velocities, (vA)2 and (vB)2. So the first equation used is the conservation of linear momentum, applied along the line of impact. (mAvA)1 + (mBvB)1 = (mAvA)2 + (mBvB)2 This provides one equation, but there are usually two unknowns, (vA)2 and (vB)2. So another equation is needed. The principle of impulse and momentum is used to develop this equation, which involves the coefficient of restitution, or e.
The equation defining the coefficient of restitution, e, is (vB)2 – (vA)2 e = (vA)1 - (vB)1 CENTRAL IMPACT (continued) The coefficient of restitution, e, is the ratio of the particles’ relative separation velocity after impact, (vB)2 – (vA)2, to the particles’ relative approach velocity before impact, (vA)1 – (vB)1. The coefficient of restitution is also an indicator of the energy lost during the impact. If a value for e is specified, this relation provides the second equation necessary to solve for (vA)2 and (vB)2.
COEFFICIENT OF RESTITUTION In general, e has a value between zero and one. The two limiting conditions can be considered: • Elastic impact (e = 1): In a perfectly elastic collision, no energy is lost and the relative separation velocity equals the relative approach velocity of the particles. In practical situations, this condition cannot be achieved. • Plastic impact (e = 0): In a plastic impact, the relative separation velocity is zero. The particles stick together and move with a common velocity after the impact. Some typical values of e are: Steel on steel: 0.5 – 0.8 Wood on wood: 0.4 – 0.6 Lead on lead: 0.12 – 0.18 Glass on glass: 0.93 – 0.95
IMPACT: ENERGY LOSSES Once the particles’ velocities before and after the collision have been determined, the energy loss during the collision can be calculated on the basis of the difference in the particles’ kinetic energy. The energy loss is U1-2 = T2− T1 where Ti = 0.5mi(vi)2 During a collision, some of the particles’ initial kinetic energy will be lost in the form of heat, sound, or due to localized deformation. In a plastic collision (e = 0), the energy lost is a maximum, although it does not necessarily go to zero. Why?
PROCEDURE FOR ANALYSIS • In most impact problems, the initial velocities of the particles and the coefficient of restitution, e, are known, with the final velocities to be determined. • Define the x-y axes. Typically, the x-axis is defined along the line of impact and the y-axis is in the plane of contact perpendicular to the x-axis. • For both central and oblique impact problems, the following equations apply along the line of impact (x-dir.): • m(vx)1 = m(vx)2 and e = [(vBx)2 – (vAx)2]/[(vAx)1 – (vBx)1] • For oblique impact problems, the following equations are also required, applied perpendicular to the line of impact (y-dir.): • mA(vAy)1 = mA(vAy)2 and mB(vBy)1 = mB(vBy)2
ijk Ho = r × mv = rxryrz mvxmvymvz ANGULAR MOMENTUM (Section 15.5) The angular momentum of a particle about point O is defined as the “moment” of the particle’s linear momentum about O. The magnitude of Ho is (Ho)z = mv d
The resultant force acting on the particle is equal to the time rate of change of the particle’s linear momentum. Showing the time derivative using the familiar “dot” notation results in the equation F = L = mv · · We can prove that the resultant moment acting on the particle about point O is equal to the time rate of change of the particle’s angular momentum about point O or Mo = r× F = Ho · RELATIONSHIP BETWEEN MOMENT OF A FORCE AND ANGULAR MOMENTUM (Section 15.6)
MOMENT AND ANGULAR MOMENTUM OF A SYSTEM OF PARTICLES The forces acting on the i-th particle of the system consist of a resultant external force Fi and a resultant internal force fi.
Considering the relationship between moment and time rate of change of angular momentum Mo = Ho = dHo/dt · By integrating between the time interval t1 to t2 t t 2 2 å å ò ò + = = - Mo dt ( Ho ) ( Ho ) ( Ho ) Mo dt or ( Ho ) 2 2 1 1 t t 1 1 PRINCIPLE OF ANGULAR IMPULSE AND MOMENTUM (Section 15.7) This equation is referred to as the principle of angular impulse and momentum. The second term on the left side, Modt, is called the angular impulse. In cases of 2D motion, it can be applied as a scalar equation using components about the z-axis.
CONSERVATION OF ANGULAR MOMENTUM When the sum of angular impulses acting on a particle or a system of particles is zero during the time t1 to t2, the angular momentum is conserved. Thus, (HO)1 = (HO)2 An example of this condition occurs when a particle is subjected only to a central force. In the figure, the force F is always directed toward point O. Thus, the angular impulse of F about O is always zero, and angular momentum of the particle about O is conserved.