Download
1 / 26
270 likes | 541 Vues
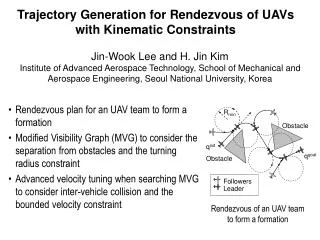
Feasible trajectories for mobile robots with kinematic and environment constraints. Paper by Jean-Paul Laumond I am Henrik Tidefelt. Paper overview. Introduction Topology and connectivity of the admissible configuration space The holonomy problem

E N D
Feasible trajectories for mobile robots with kinematic and environment constraints Paper by Jean-Paul Laumond I am Henrik Tidefelt
Paper overview • Introduction • Topology and connectivity of the admissible configuration space • The holonomy problem • Towards a mixed approach: Maneuvers in predefined contexts • Conclusion
Holonomic constraints • Constraint of the type G(q) = 0. • If independent of other constraints, “reduces” the dimension of the configuration space by 1. • Any constraint that can be transformed to this form is also holonomic. Of particular interest is constraints involving velocities, but where the time derivative can be integrated away. • (Nonholonomic constraints are sometimes caled non-integrable constraints to emphasize this.)
Holonomic constraints • The dimension of the configuration space is thus the number of parameters we use to describe our system minus the number of independent holonomic constraints. • We can find (at least local) parameterizations using only as many parameters as the dimension of the configuration space, without any internal constraints.
Nonholonomic constraints • A constraint involving parameter velocities, and that is not holonomic. • Imposes what is called a kinematic constraint on the system. • Parameters become dependent without reducing the dimensionality of the configuration space. It has become impossible to move in certain directions of the configuration space, and we call the space of directions in which we can move the tangent space.
Standard example, car-like robot • We need three parameters to specify the robot’s configuration, but the instantaneous velocity is always bound to point in the car’s main axis direction. • Control space is 2D
Standard example 2, tractor with trailers • One extra dimension to C for every trailer. • For n trailers we need n+3 parameters to describe a configuration, • but due to the n+1 independent nonholonomic constraints, the tangent space is still 2D.
Desired properties of generated trajectories • Short in distance • Few reversals (maneuvers) • Good clearance of obstacles
Property of single car “If c and c’ are two configurations in a single connected domain of ACSopen [the interior of C], then there exists a collision-free trajectory between c and c’ satisfying the kinematic constraints of MR [the car-like robot].” • Proof is constructive; it is shown how the trajectory can be built up by many simple paths (next slide) in the neighborhood of the original path. • However, it is clear that we should neither hope for short trajectories nor few reversals.
Simple paths • Generated trajectories are cumbersome and hard to optimize.
Topological property (not used in this paper) • A local planner is said to have the topological property iff • I e, if we are given a smallest clearance along our holonomic path in Cspace, then the local planner can give us a finite number of feasible paths that concatenates to a global feasible path from start to goal.
Limitations • Proves essentially that there is a local planner for the single car system that satisfies the topology property. • The proof is a bit unclear. • Since the proof is constructive for a particularly simple robot, it seem like the result does not generalize easily to other systems.
Good things • It was generalized to arbitrarily long tractor/trailer systems by Laumond himself four years later. • Given the concept “topology property”, it is obvious how the part of the proof that deals with combination of simple paths generalizes to other systems for which there is a local planner with the topology property.
Multi-level path planning for nonholonomic robots using semi-holonomic subsystems Paper by Sepanta Sekhavat, Petr Svetska, Jean-Paul Laumond, Mark H. Overmars
Paper overview, selected sections • Section 3: “Nonholonomic systems and fictive simplifications” • Section 4: “The multi-level scheme using transformations between semi-holonomic subsystems” • Section 5: “Obtaining initial paths and transformation techniques” • Section 6: “Application to tractors with trailers”
Semi-holonomic subsystems • Number the nonholonomic constraints C0, …, Cn. • Define semi-holonomic subsystems Si by removing all constraints Cj for j > i.
Multilevel scheme • Let Pi be a feasible path from start to goal for Si. • Computing P0 is supposed to be relatively easy by means of existing methods. • Transform Pi to Pi+1 for i = 0, …, n-1. • This is a global scheme that must be equipped with a local planner for each level.
Pick-and-link • Try to connect the start and goal of Pi with the local planner for Si-1. • On failure, split Pi in two halves and retry recursively. • This technique is complete if the planner satisfies the topology property.
Tube-PPP • Guide the global planner for Si+1 by restricting the free space to a “tube” around Pi. • Use probabilistic roadmap approach. • Also (probabilistically) complete given the topology property.
Techniques used in application to tractor+trailers system • Probabilistic path shortening proves to work well in practice. Applied at every stage. • Geometric NH-approximation also shows valuable. This requires a measure of the Ci+1-violation.
Conclusions • A nonholonomic system has kinematic constraints that makes the tangent space of lower dimension than the configuration space. • Even though it is possible to prove by construction that “feasible” paths exist for the car-like robot, paths generated along the lines of the proof are really awkward. This is also the general case for other basic planners for nonholonomic systems. • Therefore, it is very important to optimize the paths yielded by the basic planners.