Download
1 / 12
260 likes | 723 Vues
Robot Hardware and Control. Sarah Bergbreiter UC Berkeley June 17, 2002. Why Use TinyOS for Robots?. Hardware Hardware Modularity through Data Bus new boards are simple to add and interface Wireless Connectivity through RFM Radio Cheap and off-the-shelf Software

E N D
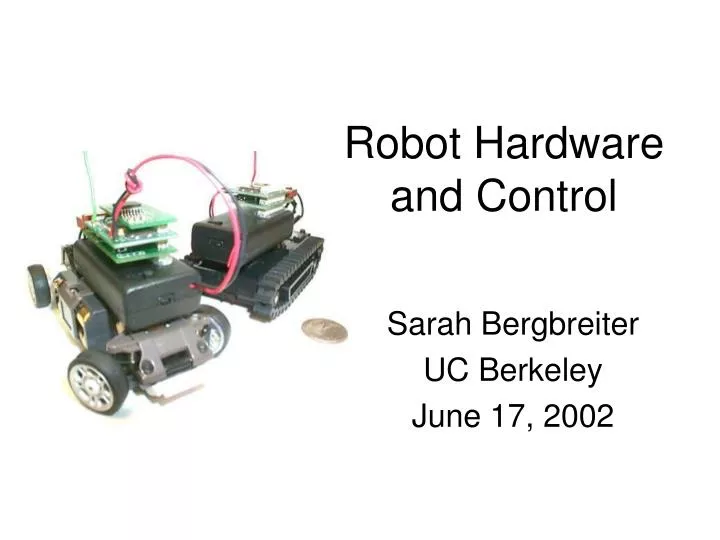
Robot Hardware and Control Sarah Bergbreiter UC Berkeley June 17, 2002
Why Use TinyOS for Robots? • Hardware • Hardware Modularity through Data Bus • new boards are simple to add and interface • Wireless Connectivity through RFM Radio • Cheap and off-the-shelf • Software • Event driven operating system convenient for behavior based control • Hardware abstraction provides a more simple interface for the application developer
Robot Hardware • 2-channel MotorBoard provides an interface between Rene I/II motes and robot platform • Currently using an off-the-shelf RC car (Kyosho Mini-Z) • Each H-bridge allows variable speed and direction to the motors through a PWM signal sent to the motors • Whisker Board is also available (binary contact)
New Robot Hardware • New Robot MotorBoard is currently being tested to interface with MICA and future NEST motes • Includes an Atmel ATmega8L processor • handles communication protocols • sends PWM signals to motors • accelerometer on board for odometry • New motor driver ICs from Intersil
The Software Interface • Three Simple Commands • setspeed(0-255) • setdir(FORWARD, REVERSE) • turn(0-40), 20 = STRAIGHT • Hardware abstraction hides changes in the hardware from application developer
Where it all comes together... Autonomous, Inexpensive, Wireless, Easy-to-Program, Modular Robots!
Open Loop Control • Open Loop Control involves a robot following a programmed path without any feedback as to where it is on that path • Path Programmed at • Install time (can not be changed) • Over wireless – Paths may be updated or generated on the fly
Can we close the loop through the Network? • No positioning sensors currently on the robots • Would like to obtain position information from the network • Using this estimated position, we can close the loop
Closed Loop Control Simulated Position Estimation Data provided by mouse clicks PID control loop
Where to go from here • Integrate with real position estimates from over the network • Integrate with System ID information (Bruno Sinopoli) and use state estimates to improve position information • Demonstrate closed loop control from the network