Download
1 / 45
1.94k likes | 6.07k Vues
Chapter 6 Controllability and Observability Controllability deals with whether or not the state of a state-space equation can be controlled from the input . Observability deals with whether or not the initial state can be observed from the output. Outline . Controllability Observability

E N D
Chapter 6 Controllability and Observability • Controllability deals with whether or not the state of a state-space equation can be controlled from the input. • Observability deals with whether or not the initial state can be observed from the output. 長庚大學電機系
Outline • Controllability • Observability • Conditions in Jordan-Form Equation • Canonical Decomposition • Controllability and observability indices • Discrete-Time State Equations. • Controllability After Sampling. • LTV State Equations. 長庚大學電機系
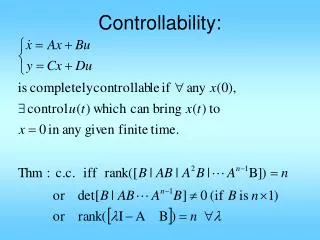
Controllability Consider the state equation where and Definition: The state equation (S1) or the pair (A,B) is said to be controllable ifinitial state x0 and any final state , an input that transfers to in a finite time. Otherwise (A,B) is uncontrollable. 長庚大學電機系
Note that, Let the control be in the form Clearly, if is a nonsingular matrix, then the control will transfer system state from x(0) at t=0 to x(t1) at time t=t1 長庚大學電機系
The control is indeed the minimum energy control among all the controls which transfer system state from x(0) at t=0 to x(t1) at t=t1 in the sense that (For proof, see e.g., C.T. Chen, “Linear system Theorem and design,” 2nd Ed., 1984, p.556) Question: Is it possible to determine system controllability without knowing the fundamental matrix? 長庚大學電機系
Theorem: The following six statements are equivalent: (C1) (A,B) is controllable. (C2) is nonsingular for any t > 0. (C3) The n by np controllability matrix has rank n. (C4) rank for all 長庚大學電機系
Remarks: • The matrix is called the controllability matrix. 長庚大學電機系
Example: Consider Controllable 長庚大學電機系
Example: Consider the system We assume that • Mass of the platform is zero. • The movements of the two spring are independent and half of the force is applied to each spring system. • The displacements of the two spring systems from equilibrium are chosen as state variables and . 長庚大學電機系
or • Clearly, x 0 as t for zero-input system since • Rank system is controllable 長庚大學電機系
Question:Can a force be applied to transfer to the equilibrium point (0,0) in 2 seconds? Yes, the control will transfer to from t = 0 to t = The desired control is 長庚大學電機系
Note that, the control is the minimum energy control. 長庚大學電機系
If the viscous friction coefficients and spring constants of both spring systems are equal 1. Then the state equation becomes Thus the equation is not controllable. If then no input can transfer this initial state to zero in a finite time. 長庚大學電機系
Observability • Controllability studies the possibility of steering the state from the input while observability studies the possibility of estimating the state from the output. The two concepts are indeed dual as will be described later. • Observability is defined under the assumption that the state equation or {A,B,C,D} is known. It is different from the problem of realization or identification, which is to determine or estimate {A,B,C,D} from the information of inputs and outputs. 長庚大學電機系
Consider the state equation where Definition: The state equation (S2) is said to be observable if unknown initial x(0), a finite time such that the knowledge of and suffices to determine x(0) uniquely. Otherwise, the equation is unobservable. 長庚大學電機系
The response of (S2) is • In the study of observability, u and y are assumed to be known. Thus the observability problem reduces to solving x(0) from (6.3). • If . In this case, the observability problem reduces to determine x(0) from its zero-input response over a finite time interval. • Ifq < n, then we can not determine x(0) uniquely from (6.3) at an isolated t. Thus, in order to determine x(0) uniquely from (6.3), we need the information u(t) and y(t) over a time interval. An example is given next. 長庚大學電機系
For example, let can not be uniquely determined at an isolated t. However x(0) in this example can be determined uniquely as 長庚大學電機系
Theorem:the state equation (S2) is observable iff is nonsingular for any t > 0. Remark: • Observability depends only on A and C and independent of B and D. Thus observability can be deduced by choosing . • By the previous theorem and that for controllability, we have the theorem of duality as described below. Theorem: (Theorem of duality) (A,B) is controllable iff is observable. 長庚大學電機系
Theorem:The following four statements are equivalent: (1) (A,C) is observable (2) is nonsingular for any t >0. (3) rank( ) = rank (4) rank for every eigenvalue of A. . 長庚大學電機系
Conditions for Jordan-Form • If the state equation is in Jordan form, the checking conditions for controllability and observability become very simple as will be shown now. • Let . Define row of B corresponding to the last row of , column of C corresponding to the 1st column of . 長庚大學電機系
Theorem:Let Then (i) (A,B) is controllable iff is linearly independent, and is linearly independent (ii) (A,C) is observable iff is linearly independent and is linearly independent. 長庚大學電機系
Example: consider the Jordan form state equation It is easy to check that (A,B) is controllable but (A,C) is NOT observable. 長庚大學電機系
Corollary:Consider a n-dimensional Jordan form state equation with p input and q outputs • If there are m Jordan blocks associated with a same eigenvalue withm>p, then system is NOT controllable. • If there are m Jordan blocks associated with a same eigenvalue withm>q, then system is NOT observable. • If p=1 (resp., q=1), and system is controllable (resp., observable) iff there is only one Jordan block associated with each distinct eigenvalues and every entry of B (resp., C) corresponding to the last row (resp., 1st column) of each Jordan block is different from zero. 長庚大學電機系
Example Consider observable but not controllable 長庚大學電機系
Properties of Controllability and Observability Theorem: Controllability and observability are invariant under equivalence transformation. 長庚大學電機系
Remark: Controllability can not be affected by any (linear) state feedback(to be discussed in Chapter 8); However, observability might be affected by state feedback. For example, is observable. However, if we introduce u = r + (-3 -1)x is NOT observable. 長庚大學電機系
Question: What can we do if (A,B) is uncontrollable and/or (A,C) is unobservable? 長庚大學電機系
Canonical Decomposition 長庚大學電機系
Consider • Let • Where • Where C is the controllability matrix and O is the observability matrix 長庚大學電機系
Theorem:Consider the n-dimensional equation (S2) with Define , where the first columns of Q are any linearly independent columns of and Q is nonsingular. Then the change of variable results in Moreover, is controllable and has the same transfer matrix as (S2) 長庚大學電機系
Block diagram 長庚大學電機系
Remark: • is not affected by input. • Dynamics of does not appear in the transfer function. i.e., the associated eigenvalues do not appear as poles of the transfer function. • If The governing equation in new variable becomes which is controllable. Thus, 長庚大學電機系
The trajectory can be decomposed as or such that is independent of control, while can be transferred to any place of by a suitable choice of control input. 長庚大學電機系
Example: Consider • rank( )=2 • Choose • The equation is controllable and has the same transfer function as the original equation 長庚大學電機系
Consider the n-dimensional equation (S2) with Define Suppose that the first rows of are any linearly independent rows of and P is nonsingular. The change of variable reduces the system to 長庚大學電機系
Theorem:Consider the n-dimensional equation (S2) with Define where the first rows of are any linearly independent rows of and P is nonsingular. Then yields and the n2-dimensional subequation is observable and has the same transfer matrix as that of (S2) 長庚大學電機系
Block diagram 長庚大學電機系
Theorem:(Kalman Decomposition Theorem) Everystate-space equation can be transformed by an equivalent transformation into the following canonical form: 長庚大學電機系
Moreover, the equation is zero-state equivalent to which is controllable and observable and has the same transfer matrix as that of (S2) 長庚大學電機系
LTV State Equations Consider a n-dimensional, p-input and q-output state equation Definition:The state equation is said to be controllable at if that transfers to at time otherwise, it is uncontrollable at . • In LTI case, if a state equation is controllable at , then it is controllable at every other t. 長庚大學電機系
Theorem:The state equation (LTV) or (A(t),B(t)) is controllable at t0 iff is nonsingular. • To apply the previous theorem, we need the information of state transition matrix. However, it is in general not easy to compute state transition matrix. The following theorem presents a controllability condition without involving Define M_0(t)=B(t); M_m+1(t)=-A(t)M_m(t)+M’_m(t) for m=0,1,…,n-1 長庚大學電機系
Theorem:Let A(t), B(t) .Then (A(t), B(t)) is controllable at t0 if ExampleConsider System is controllable at every t 長庚大學電機系
Example: By direct calculation, the LTI system Is the LTV system • The state transition matrix is is singular for any t and (since det=0) The LTV system is not controllable at any 長庚大學電機系
Definition:(A(t),C(t)) is observable at t0 if the knowledge of input and output over suffices to determine uniquely . Otherwise, the system is unobservable at . Theorem:(A(t),C(t)) is observable at t0 iff is nonsingular Theorem: Let is observable at t0 if where and 長庚大學電機系