Download
1 / 11
110 likes | 266 Vues
MPIA. CPMechChop PACS Chopper control loop optimisation. PACS Commissioning and PV Phase Plan Review 21 st – 22 nd January 2009, MPE Garching. Markus Nielbock, Ulrich Klaas (MPIA). Instrumental background. chopper serves two main purposes.

E N D
MPIA CPMechChopPACS Chopper control loop optimisation PACS Commissioning and PV Phase Plan Review 21st – 22nd January 2009, MPE Garching Markus Nielbock, Ulrich Klaas (MPIA)
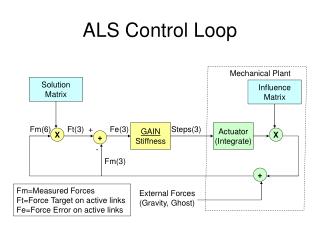
Instrumental background • chopper serves two main purposes • differentiated signal for background subtraction • deflection mirror • uncontrolled power supply causes oscillations M. Nielbock, U. Klaas – CPMechChop • PID control loop modulates drive current to achieve stable chopper plateaus • up to 12 parameters to tune (7 + 5 for oscillation suppression filter)
Commissioning programme • four commissioning blocks via real time manual commanding M. Nielbock, U. Klaas – CPMechChop • one commissioning block via MTL • results provide an updated calibration uplink (CALU) table
Stability verification • FM-ILT: amplification of previously unknown resonances • feedback to control loop produces potentially dangerous instabilities • electronic passband filter needs tuning (2 input parameters) M. Nielbock, U. Klaas – CPMechChop
Stability verification • verify stability of chopper position in several steps • enable controller for one second without moving chopper • software limits help preventing fatal reactions • enable controller for five minutes without moving chopper • enable controller for five minutes and keep chopper at a few degrees • once established only minor modifications may be necessary M. Nielbock, U. Klaas – CPMechChop • parameter tuning supported by MATLAB modelling • QLA available for on-line check • detailed real time off-line analysis possible within a few minutes • MOIS procedures tested during SOVT-2 at MOC
Dynamic behaviour verification • verify proper chopper performance (transition time and pattern) M. Nielbock, U. Klaas – CPMechChop • if unsatisfactory, PID tuning necessary (5 parameters) • set of manual procedures available and tested during FM-ILT and FM-IST • parameter tuning benefits from experience • may be supported by MATLAB modelling • only little modifications are expected during commissioning
PID tuning procedure initial set of parameters chopping measurement record input movement generate input analyse adjust parameter(s) MATLAB Model bad good final set of parameters M. Nielbock, U. Klaas – CPMechChop
PID tuning procedure • QLA available for on-line check • analysis provides visual and numerical data for evaluation stability corridor M. Nielbock, U. Klaas – CPMechChop movement Chopper angle (digital units) stimulus • best value so far: 19 ms for transition within PACS sky FOV • PID parameters of best performance provide new CALU table
PID parameter fine tuning (PICC-MA-TN-002) • automated sequence probing permutations of four PID parameters • modifying one or more parameters can compensate for another • maximum variation by 2% of initial parameter value (from manual tuning) • combinations of two to four parameter variations M. Nielbock, U. Klaas – CPMechChop • in total 159 valid sets available (CALU table) • table produced by automated script with default parameters as input • restriction to subsets possible • translated into CUS and engineering AOT MTL scheduling
PID parameter fine tuning (PICC-MA-TN-002) • measurement like manual tuning • 10 chopping cycles @ 0.5 Hz between ± 4° in focal plane • off-line analysis in principle like manual version • identification of parameter sets by setting BBIDs M. Nielbock, U. Klaas – CPMechChop • estimated time required for one full loop: 2.7 h • measurement may be repeated using new set of parameters • PID parameters of best performance provide new CALU table
Summary • Commissioning plan for chopper verification and tuning fully defined and implemented. • Separated into four real time manual commanding blocks and one automated MTL block. • All procedures already tested during FM-ILT, FM-IST, SOVT-2. M. Nielbock, U. Klaas – CPMechChop • Off-line analysis is available and thoroughly tested. • requested observation time in total: 23 h (less may be sufficient) • Optional additional refinery can be easily planned and executed.