Download
1 / 23
230 likes | 262 Vues
Understanding fixed-priority scheduling, rate-monotonic scheduling, Dhall’s effect, utilization bounds, and RM-US concept in multiprocessor scheduling. Exploring partitioned vs. global scheduling and priority-driven algorithms.

E N D
Analyzing Fixed-Priority Global Multiprocessor Scheduling Seminar Multiprocessor Scheduling May 22 2006 Tobias Queck
Content • Problem Definition • Fixed-Priority Scheduling • Rate-monotonic Scheduling (RMS) • Dhall’s effect • Bound on utilization bounds • RM-US[US-LIMIT] • US-LIMIT = 0,33 • US-LIMIT = 0,37482 • Summary
Problem Definition Partition Priorities Definitions
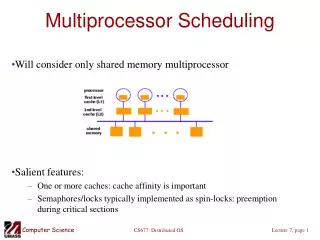
Partioned versus global scheduling • Partioned • A task is assigned ones to only one processor • Global • Task migration is permitted • Assumption: no penalty associated with task migration • One task can use more the one processor • But only one at any given time
Priority driven scheduling algorithms vs. Non-Preemprive • Preemptive • Tasks with low priority will be interrupted by incoming tasks with higher priority • Static • Priorities for task are assigned ones • Dynamic • Priorities might change during runtime
Problem definition • n independent tasks • Task ti (1 ≤ i ≤ n) • Execution requirement Ci • Period Ti • Utilization Ui = Ci / Ti • multiprocessor with midentical processors • . • A task set is schedulable if all tasks meet their deadlines (end of period) in all periods
Fixed-Priority Scheduling Rate-monotonic Scheduling (RMS) Dhall’s effect Bound on utilization bounds
Rate-monotonic Scheduling • Algorithm • Priorities assigned inversely proportional to their periods • Proved Theorems [3]: • A critical instant for any task occurs whenever the task is requested simultaneously with requests for all higher priority tasks. • If a feasible priority assignment exists for some task set, the rate-monotonic priority assignment is feasible for the task set. • For a set of m tasks with fixed priority order the least upper bound to processor utilization factor is U = m(21/m – 1)
Dhall’s Effect t1: C1=1 T1=4 U1=25% t2: C2=1 T2=4 U2=25% t3: C3=4 T3=5 U3=80% misses deadline m = 2, US = (25%+25%+80%)/2 = 65%
Dhall’s Effect t1: C1=1 T1=4 U1=25% t2: C2=1 T2=4 U2=25% . . . tn-1: Cn-1=1 Tn-1=4 Un-1=25% tn: Cn=4 Tn=5 Un=80% misses deadline m = n-1, US = ((n-1)*25% + 80%)/m = 25%
Dhall’s Effect t1: C1=1 T1=8 U1=12,5% t2: C2=1 T2=8 U2=12,5% . . . tn-1: Cn-1=1 Tn-1=8 Un-1=12,5% tn: Cn=8 Tn=9 Un=88% misses deadline m=n-1, US=12,5%
Dhall’s Effect t1: C1=1 T1=x U1=0% t1: C1=1 T1=x U2=0% . . . tn-1: Cn-1=1 Tn-1=x Un-1=0% tn: Cn=x Tn=x+1 Un=100% misses deadline m=n-1, US0% with infinitely large x
Bound on utilization bounds t1: C1=1 T1=4 U1=25% t1: C1=2 T1=4 U1=50% “The utilization guarantee bound for any static-priority multiprocessor scheduling algorithm (partitioned or global) cannot be higher than 1/2 of the capacity of the multiprocessor platform.” [2] t2: C2=1 T2=4 U2=25% t2: C2=2 T2=4 U2=50% t3: C3=1 T3=4 U2=25% t3: C3=2 T3=4 U2=50% t4: C4=2 T4=4 U4-=50% t4: C4=1 T4=4 U4=25% m = 3
RM-US[US-LIMIT] Idea Example Finding optimal US-LIMIT
Idea • Task ti with Ui ≤ US-LIMIT • Lower priorities than tasks with Ui > US-LIMIT • Priorities assigned according to the rate monotonic priority assignment scheme • Task ti with Ui > US-LIMIT • Highest priority • Proved Limit [2]:
Example • Processors m = 3 • Scheduling Algorithm RM-US[0,429] • Task set: • 2 • 3 • 1 • 3
Finding optimal US-LIMIT • Select a task set such that the task set is not schedulable and such that there is no other unschedulable task set with a lower US (called extremal task set). • m high prior tasks form block interference to a lower prior task (tn) • All tasks are released first at the same time • All m task are released two times within Tn • m is infinitely large • Ci = ∂ is infinitely small (1 ≤ i ≤ x) • Ti = Tn - i∂ (1 ≤ i ≤ m)
Finding optimal US-LIMIT (2) • Definition: • Following Situation:
Finding optimal US-LIMIT (3) • Calculating US-LIMIT
Being able to schedule all task sets? • Three exhaustive cases • All tasks have Ui ≤ US-LIMIT • All tasks have Ui > US-LIMIT • Some tasks have Ui > US-LIMIT and some have Ui ≤ US-LIMiT
Thank you for your attention References Questions?
References [1] Lars Lundberg, "Analyzing Fixed-Priority Global Multiprocessor Scheduling“, rtas, p. 145, Eighth IEEE Real-Time and Embedded Technology and Applications Symposium (RTAS'02), 2002. [2] B. Andersson, S. Baruah, and J. Jonsson, “Static-priority scheduling on multiprocessors”, in Proc. of the IEEE Real-Time Systems Symposium (RTSS'01), Dec. 3-6, 2001, London, pp. 193 - 202. [3] C. L. Liu and J. W. Layland, “Scheduling algorithms for multiprogramming in a hard real-time environment”, Journal of the ACM, 20(1): 46-61, Jan. 1973.