Download
1 / 1
20 likes | 180 Vues
Medical Applications of Robotics Tim Sigler M.E., Jaydip Desai M.E., Andrew Abadeer , Dan Collins, Mary Ann Collins, Jared Crean , Russell Nadler, Ruchika Sharma, James Varbanov , Prof. Arthur Ritter Ph.D., Warren Wells ‘44 BioRobotics Lab. Technogenesis & Scholars

E N D
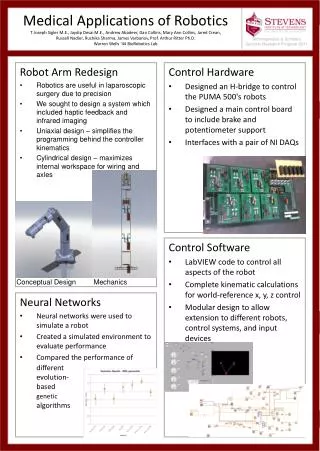
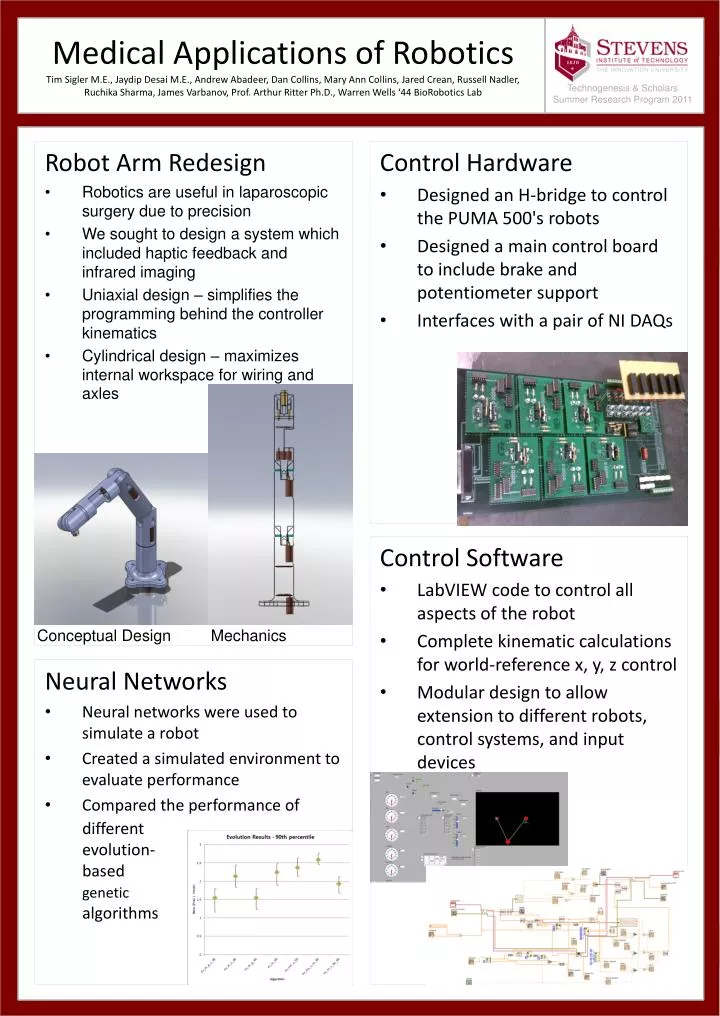
Medical Applications of RoboticsTim Sigler M.E., Jaydip Desai M.E., Andrew Abadeer, Dan Collins, Mary Ann Collins, Jared Crean, Russell Nadler, Ruchika Sharma, James Varbanov, Prof. Arthur Ritter Ph.D., Warren Wells ‘44 BioRobotics Lab Technogenesis & Scholars Summer Research Program 2011 • Robot Arm Redesign • Robotics are useful in laparoscopic surgery due to precision • We sought to design a system which included haptic feedback and infrared imaging • Uniaxial design – simplifies the programming behind the controller kinematics • Cylindrical design – maximizes internal workspacefor wiring and axles Control Hardware • Designed an H-bridge to control the PUMA 500's robots • Designed a main control board to include brake and potentiometer support • Interfaces with a pair of NI DAQs • Control Software • LabVIEW code to control all aspects of the robot • Complete kinematic calculations for world-reference x, y, z control • Modular design to allow extension to different robots, control systems, and input devices Conceptual Design Mechanics • Neural Networks • Neural networks were used to simulate a robot • Created a simulated environment to evaluate performance • Compared the performance of different evolution-based genetic algorithms