Download
1 / 17
170 likes | 269 Vues
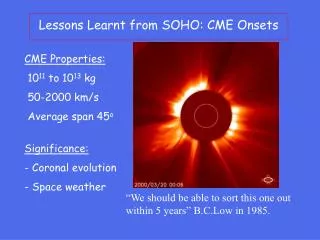
SWPC CME Imaging Requirements for the post-SOHO era. Douglas Biesecker 3/25/2014. CME General Requirements. CME Measurement Requirements. *note, there is a direct correlation of sampling frequency and FOV. Should one be made

E N D
SWPC CME Imaging Requirements for the post-SOHO era Douglas Biesecker 3/25/2014
CME Measurement Requirements *note, there is a direct correlation of sampling frequency and FOV. Should one be made larger, the other must be made larger as well. The driver’s are how many CME images you need and what’s the fastest plane of sky speed you can expect. †CDAW LASCO CME catalog for 10 Nov 2004 ΔFOV(in solar radii) = (# of CME images)(CME speed)(sampling frequency)(60)/(695980km) e.g. ΔFOV = (3*3400km/s*15min*60s/min)/695980km = 13.2 solar radii
Data Continuity 67% duty cycle in any 45 minute window • The worst case scenario means we need at least 2 images of every CME. • The proposed requirement is specific to the current set of requirements • A duty cycle of 67% means getting 2 of 3 images in any 45 minute period. • I realize there’s a 1 image ambiguity (intentional) It really only takes 30 minutes to get 3 images • Can this be generalized?
Contamination No more than 10% of pixels in an image shall have a count rate more than 5 sigma above the background during a solar radiation storm reaching the S5 level. • The need is to be able to identify the CME edges • A rough study by Biesecker (also Thernisien) showed that if 20% of an image is significantly contaminated, then resolving the edges becomes difficult • Since the normal mode of viewing is difference images, this limits the contamination per image to 10%. • We use the threshold of an S5 event, which has never been observed • 5 min avg, ≥10 MeV ions, reaching 105 particles/sec/sr/cm2 • Alternatively, Llebaria et al 1998 showed that if fewer than 30% of pixels are contaminated, then the image can be corrected
Spectral Response The bandpass selected shall be ‘white-light,’ that is, lie within 5000-8000 angstroms • Based on the fact that all forecasting to date, and really the definition of a CME itself, is in the visible light portion of the spectrum
Polarized brightness The ability to use polarization techniques to separate the K-corona signal from other signals may be provided • The benefits • Automatic rejection of most of the F-corona (in the FOV in question) • Narrower scattering function • Total brightness can still be computed and the difference between B and pB is effectively an additional view (well, maybe 2.5d instead of 2) • But is anybody out there really using it to great effect? • It adds to the cost of the instrument, so I need a good reason to have it.
Pointing Knowledge The line of sight pointing knowledge shall be 24 arc-sec. The direction of solar north shall be known to within 1 degree • In order to accurately characterize a CME for input to Enlil, I need to know where the Sun is pretty accurately. That’s trivial to do, as we get plenty of stars to calibrate against. So, this is overspecified, but not a big deal.
Flux Resolution The measurement precision (or flux resolution) shall be ≤1x10-12 B/Bsun/pixel in the outer part of the FOV. In the inner part of the FOV the flux resolution shall be ≤2x10-11 B/Bsun/pixel. • Need to have sufficient resolution to identify CME leading edge • Differs across FOV as the background (and CME brightness) both vary with radial distance
Straylight The straylight measured at the focal plane at the midpoint of the FOV shall not exceed 5x10-11 B/Bsun • Need to keep straylight manageable. If it’s constant, it’s easy to remove. Requirement assumes it’s not constant, so we have to beat it down.
Sampling Frequency A cadence of at least one full FOV image in 15 minutes • As noted, cadence is a strong function of FOV. • Higher cadences, with same FOV, offer advantages • Easier to separate overlapping CMEs • More images to pick ‘best’ ones for analysis • Provides margin against even faster CMEs A cadence of at least one full FOV image in 10 minutes
Inner/Outer FOV Cutoff The field of view (FOV) shall be an annulus, centered on the Sun. The inner radius of the annulus shall be 3.0 solar radii. The outer radius of the annulus shall be at least 17 solar radii. • The inner FOV is set ‘high’ because • CME’s are still evolving (self-similar expansion assumption has not yet set in) • Makes straylight rejection easier • Not too high, though, as overlapping CME’s still need to be distinguished as individuals • The outer FOV needs to be far enough out to allow enough images of the fastest CME. • We bias towards larger fields of view as we want the CME asymptotic speed. Acceleration in the low corona is not important.
Maximum CME Speed 3400 km/s • A ‘derived’ requirement • This is the fastest CME in the LASCO era • Linear speed for 10 November 2004 West Limb CME
# of CME Images 3 • The minimum number of CME images needed is 2, to derive direction, width, and speed • Setting it to 3 gives us some margin • You’d really like to have more • That drives cost 4
Measurement Range The measurement range shall be ≤1x10-11 B/Bsun at the outer radius of the FOV. The measurement range shall be ≥2.6x10-9B/Bsun at the inner radius of the FOV. • Driven by K+F+CME • Depends on the inner/outer FOV cutoff
Flux Measurement Accuracy The data shall be calibrated to an absolute accuracy of 10% at the midpoint of the FOV. • Need isn’t there today, as all inputs are morphology driven • Mass inputs to models are clearly needed and we need calibration accuracy sufficient to meet those needs
Data Latency Data latency from the time an exposure finishes to the time of delivery to NOAA/SWPC shall not exceed 15 minutes • This matches the image cadence, meaning we don’t require on-board storage. • Operations assumes constant telemetry • This plays into lead time for extreme events. Data latency from the time an exposure finishes to the time of delivery to NOAA/SWPC shall not exceed 10 minutes