Download
1 / 1
10 likes | 171 Vues
腰部 彎曲角度監測回饋、肌力刺激模組 硬體 開發與阻力 式表現回饋 / 結果 回饋復健訓練 程式設計. 腰部 彎曲角度回饋剛性適應控制與肌力刺激之下背肌訓練 模組應用 驗證. Development and Application of a Waist Angle Biofeedback Prosthesis with Stiffness Adaptive Control and Muscle Strength Stimulation. *. *. *. 角度. F/S ratio. F/S ratio. 研究背景、動機與目的.

E N D
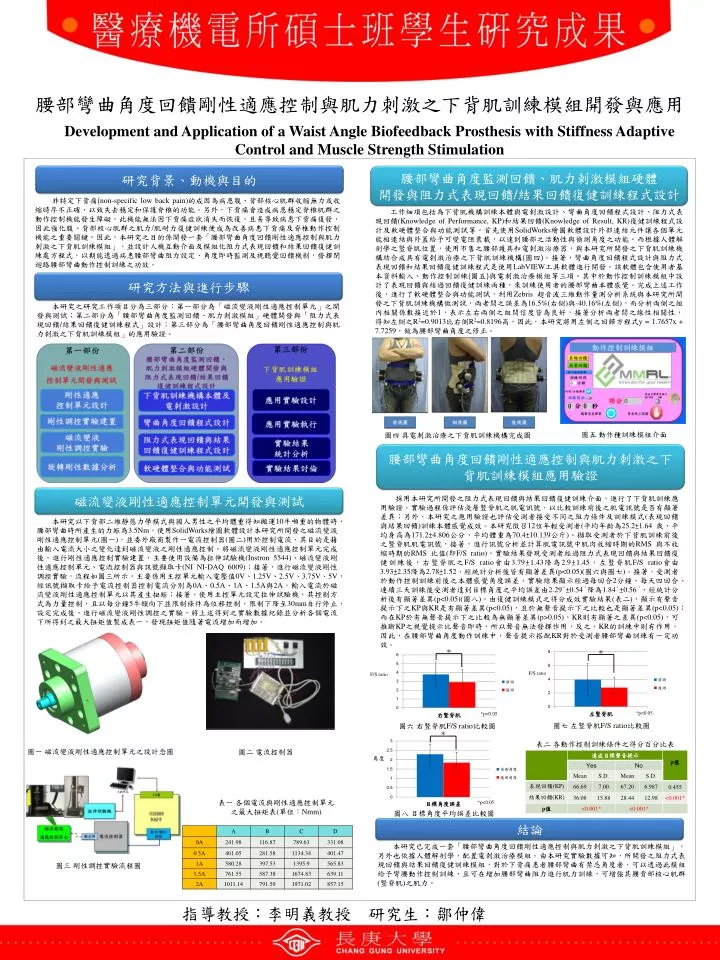
腰部彎曲角度監測回饋、肌力刺激模組硬體 開發與阻力式表現回饋/結果回饋復健訓練程式設計 腰部彎曲角度回饋剛性適應控制與肌力刺激之下背肌訓練模組應用驗證 Development and Application of a Waist Angle Biofeedback Prosthesis with Stiffness Adaptive Control and Muscle Strength Stimulation * * * 角度 F/S ratio F/S ratio 研究背景、動機與目的 非特定下背痛(non-specific low back pain)的成因為病患腹、背部核心肌群收縮無力或收縮時序不正確,以致失去穩定和保護脊椎的功能。另外,下背痛會造成病患穩定脊椎肌群之動作控制機能發生障礙,此機能無法因下背痛症狀消失而恢復,且易導致病患下背痛復發,因此強化腹、背部核心肌群之肌力/肌耐力復健訓練便成為改善病患下背痛及脊椎動作控制機能之重要關鍵。因此,本研究之目的係開發一套「腰部彎曲角度回饋剛性適應控制與肌力刺激之下背肌訓練模組」,並設計人機互動介面及模組化阻力式表現回饋和結果回饋復健訓練處方程式,以期能透過病患腰部彎曲阻力設定、角度即時監測及視聽覺回饋機制,發揮閉迴路腰部彎曲動作控制訓練之功效。 *p<0.05 *p<0.05 *p<0.05 工作細項包括為下背肌機構訓練本體與電刺激設計、彎曲角度回饋程式設計、阻力式表現回饋(Knowledge of Performance, KP)和結果回饋(Knowledge of Result, KR)復健訓練程式設計及軟硬體整合與功能測試等。首先使用SolidWorks繪圖軟體設計外部連結元件讓各個單元能相連結與外蓋給予可變電阻裝載,以達到腰部之活動性與偵測角度之功能。而根據人體解剖學之豎脊肌位置,使用市售之腰部護具和電刺激治療器,與本研究所開發之下背肌訓練機構結合成具有電刺激治療之下背肌訓練機構(圖四)。接著,彎曲角度回饋程式設計與阻力式表現回饋和結果回饋復健訓練程式是使用LabVIEW工具軟體進行開發。該軟體包含使用者基本資料輸入、動作控制訓練(圖五)與電刺激治療模組等三項。其中於動作控制訓練模組中設計了表現回饋與結過回饋復健訓練兩種,來訓練使用者的腰部彎曲本體感覺。完成上述工作後,進行了軟硬體整合與功能測試,利用Zebris超音波三維動作量測分析系統與本研究所開發之下背肌訓練機構做測試,兩者間之誤差為16.5%(右側)與-40.16%(左側),而分析兩側之組內相關係數接近於1,表示左右兩側之組間信度皆為良好,接著分析兩者間之線性相關性,得知左側之R2=0.9013比右側R2=0.8196高,因此,本研究將用左側之回歸方程式y = 1.7657x + 7.7259,做為腰部彎曲角度之修正。 研究方法與進行步驟 腰部彎曲角度回饋剛性適應控制與肌力刺激之下背肌訓練模組開發與應用 本研究之研究工作項目分為三部分:第一部分為「磁流變液剛性適應控制單元」之開發與測試;第二部分為「腰部彎曲角度監測回饋、肌力刺激模組」硬體開發與「阻力式表現回饋/結果回饋復健訓練程式」設計;第三部分為「腰部彎曲角度回饋剛性適應控制與肌力刺激之下背肌訓練模組」的應用驗證。 圖五動作種訓練模組介面 圖四 具電刺激治療之下背肌訓練機構完成圖 採用本研究所開發之阻力式表現回饋與結果回饋復健訓練介面,進行了下背肌訓練應用驗證。實驗過程係評估淺層豎脊肌之肌電訊號,以比較訓練前後之肌電訊號是否有顯著差異;另外,本研究之應用驗證也評估受測者接受不同之阻力條件及訓練模式(表現回饋與結果回饋)訓練本體感覺成效。本研究徵召12位年輕受測者(平均年齡為25.2±1.64 歲,平均身高為171.2±4.806公分,平均體重為70.4±10.139公斤)。擷取受測者於下背肌訓練前後之豎脊肌肌電訊號,接著,進行訊號分析並計算肌電訊號中肌肉收縮時期的RMS 與不收縮時期的RMS 比值(即F/S ratio)。實驗結果發現受測者經過阻力式表現回饋與結果回饋復健訓練後,右豎脊肌之F/S ratio會由3.79±1.43降為2.9±1.45,左豎脊肌F/S ratio會由3.93±2.35降為2.78±1.52,經統計分析後皆有顯著差異(p<0.05)(圖六與圖七)。接著,受測者於動作控制訓練前後之本體感覺角度誤差,實驗結果顯示經過每回合2分鐘、每天四回合、連續三天訓練後受測者達到目標角度之平均誤差由2.29°±0.54°降為1.84°±0.56°,經統計分析後有顯著差異(p<0.05)(圖八)。由復健訓練模式之得分成效實驗結果(表二),顯示有聲音提示下之KP與KR是有顯著差異(p<0.05),且於無聲音提示下之比較也是顯著差異(p<0.05);而在KP於有無聲音提示下之比較為無顯著差異(p>0.05),KR則有顯著之差異(p<0.05),可推斷KP之視覺提示比聲音即時,所以聲音無法發揮作用,反之,KR的訓練中則有作用,因此,在腰部彎曲角度動作訓練中,聲音提示搭配KR對於受測者腰部彎曲訓練有一定功效。 磁流變液剛性適應控制單元開發與測試 本研究以下背部二維靜態力學模式與國人男性之平均體重得知搬運10牛噸重的物體時,腰部彎曲時所產生的力矩為3.5Nm,使用SolidWorks繪圖軟體設計本研究所開發之磁流變液剛性適應控制單元(圖一),並委外廠商製作一電流控制器(圖二)用於控制電流,其目的是藉由輸入電流大小之變化達到磁流變液之剛性適應控制。將磁流變液剛性適應控制單元完成後,進行剛性適應控制實驗建置,主要使用設備為拉伸試驗機(Instron 5544)、磁流變液剛性適應控制單元、電流控制器與訊號擷取卡(NI NI-DAQ 6009);接著,進行磁流變液剛性調控實驗,流程如圖三所示,主要係用主控單元輸入電壓值0V、1.25V、2.5V、3.75V、5V,經訊號擷取卡給予電流控制器控制電流分別為0A、0.5A、1A、1.5A與2A,輸入電流於磁流變液剛性適應控制單元以其產生扭矩;接著,使用主控單元設定拉伸試驗機,其控制方式為力量控制,且以每分鐘5牛頓向下並限制條件為位移控制,限制下降至30mm自行停止,設定完成後,進行磁流變液剛性調控之實驗,將上述得到之實驗數據紀錄並分析各個電流下所得到之最大扭矩值製成表一,發現扭矩值隨著電流增加而增加。 圖七 左豎脊肌F/S ratio比較圖 圖六 右豎脊肌F/S ratio比較圖 表二 各動作控制訓練條件之得分百分比表 圖一 磁流變液剛性適應控制單元之設計念圖 圖二 電流控制器 • 表一各個電流與剛性適應控制單元 • 之最大扭矩表(單位:Nmm) 圖八 目標角度平均誤差比較圖 結論 本研究已完成一套「腰部彎曲角度回饋剛性適應控制與肌力刺激之下背肌訓練模組」,另外也依據人體解剖學,配置電刺激治療模組。由本研究實驗數據可知,所開發之阻力式表現回饋與結果回饋復健訓練模組,對於下背痛患者腰部彎曲有禁忌角度者,可以透過此模組給予彎腰動作控制訓練,且可在增加腰部彎曲阻力進行肌力訓練,可增強其腰背部核心肌群(豎脊肌)之肌力。 圖三剛性調控實驗流程圖 指導教授:李明義教授 研究生:鄒仲偉
