Download
1 / 1
10 likes | 102 Vues
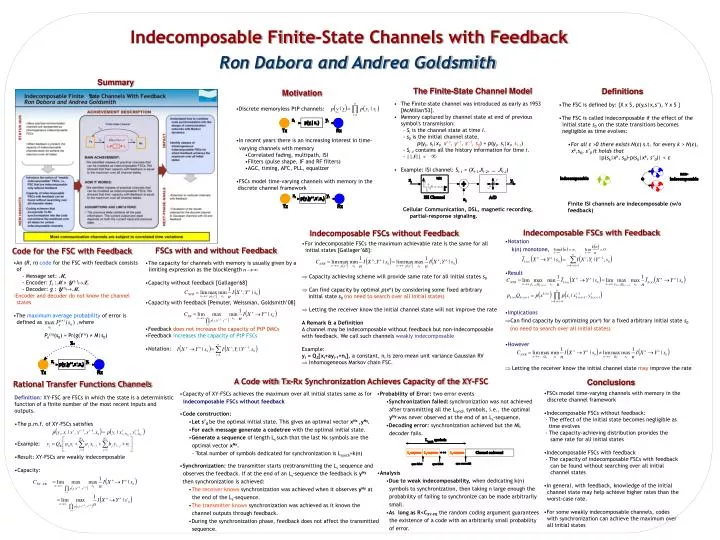
Indecomposable Finite-State Channels with Feedback. Ron Dabora and Andrea Goldsmith. Summary. The Finite-State Channel Model. Definitions. Motivation. The Finite-state channel was introduced as early as 1953 [McMillan'53].

E N D
Indecomposable Finite-State Channels with Feedback Ron Dabora and Andrea Goldsmith Summary The Finite-State Channel Model Definitions Motivation • The Finite-state channel was introduced as early as 1953 [McMillan'53]. • Memory captured by channel state at end of previous symbol's transmission: • - Siis the channel state at time i. • - s0 is the initial channel state. • p(yi, si|xi, xi-1, yi-1, si-1, s0) = p(yi, si|xi, si-1) • - Si-1 contains all the history information for time i. • - ||S|| < • Example: ISI channel: Si-1 = (Xi-1,Xi-2, … ,Xi-J) • Cellular Communication, DSL, magnetic recording, partial-response signaling. • The FSC is defined by: {X x S, p(y,s|x,s’), Y x S } • The FSC is called indecomposable if the effect of the • initial state s0 on the state transitions becomes • negligible as time evolves: • For all ε>0 there exists N(ε) s.t. for every k > N(ε), • xk,s0, s’0 it holds that • |p(sk|xk, s0)-p(sk|xk, s’0)| < ε • Finite ISI channels are indecomposable (w/o feedback) • Discrete memoryless PtP channels: • In recent years there is an increasing interest in time- • varying channels with memory • Correlated fading, multipath, ISI • Filters (pulse shape, IF and RF filters) • AGC, timing, AFC, PLL, equalizer • FSCs model time-varying channels with memory in the • discrete channel framework Indecomposable FSCs with Feedback Indecomposable FSCs without Feedback • Notation • k(n) monotone, • Result • Implications • Can find capacity by optimizing p(xn) for a fixed arbitrary initial state s0 (no need to search over all initial states) • However • Letting the receiver know the initial channel state may improve the rate • For indecomposable FSCs the maximum achievable rate is the same for all • initial states [Gallager’68]: • Capacity achieving scheme will provide same rate for all initial states s0 • Can find capacity by optimal p(xn) by considering some fixed arbitrary initial state s0 (no need to search over all initial states) • Letting the receiver know the initial channel state will not improve the rate A Remark & a Definition A channel may be indecomposable without feedback but non-indecomposable with feedback. We call such channels weakly indecomposable Example: yi = Q2[xi+ayi-1+ni], a constant, ni is zero-mean unit variance Gaussian RV Inhomogeneous Markov chain FSC. FSCs with and without Feedback Code for the FSC with Feedback • An (R, n) code for the FSC with feedback consists • of • - Message set: M, • - Encoder: fi:M × Y i-1X, • - Decoder: g : Y nM. • Encoder and decoder do not know the channel • states • The maximum average probability of error is • defined as ,where • Pe(n)(s0) = Pr(g(Yn) ≠M|s0) • The capacity for channels with memory is usually given by a • limiting expression as the blocklength • Capacity without feedback [Gallager'68] • Capacity with feedback [Pemuter, Weissman, Goldsmith’08] • Feedback does not increase the capacity of PtP DMCs • Feedback increases the capacity of PtP FSCs • Notation: ? A Code with Tx-Rx Synchronization Achieves Capacity of the XY-FSC Conclusions Rational Transfer Functions Channels • FSCs model time-varying channels with memory in the • discrete channel framework • Indecomposable FSCs without feedback: • - The effect of the initial state becomes negligible as • time evolves • - The capacity-achieving distribution provides the • same rate for all initial states • Indecomposable FSCs with feedback • - The capacity of indecomposable FSCs with feedback • can be found without searching over all initial • channel states • In general, with feedback, knowledge of the initial • channel state may help achieve higher rates than the • worst-case rate. • For some weakly indecomposable channels, codes • with synchronization can achieve the maximum over • all initial states • Capacity of XY-FSCs achieves the maximum over all initial states same as for • indecomposable FSCs without feedback • Code construction: • Let s’0be the optimal initial state. This gives an optimal vector xNx ,yNy. • For each message generate a codetree with the optimal initial state. • Generate asequence of length Ls such that the last Nx symbols are the • optimal vector xNx. • - Total number of symbols dedicated for synchronization isLsynch=k(n) • Synchronization: the transmitter starts (re)transmitting the Ls sequence and • observes the feedback. If at the end of an Ls-sequence the feedback is yNy • then synchronization is achieved: • The receiver knows synchronization was achieved when it observes yNy at • the end of the Ls-sequence. • The transmitter knows synchronization was achieved as it knows the • channel outputs through feedback. • During the synchronization phase, feedback does not affect the transmitted • sequence. • Probability of Error: two error events • Synchronization failed:synchronization was not achieved • after transmitting all the Lsynch symbols, i.e., the optimal • yNy was never observed at the end of an Ls-sequence. • Decoding error: synchronization achieved but the ML • decoder fails. • Analysis • Due to weak indecomposability, when dedicating k(n) • symbols to synchronization, then taking n large enough the • probability of failing to synchronize can be made arbitrarily • small. • As long as R<CXY-FBthe random coding argument guarantees • the existence of a code with an arbitrarily small probability • of error. • Definition: XY-FSC are FSCs in which the state is a deterministic function of a finite number of the most recent inputs and • outputs. • The p.m.f. of XY-FSCs satisfies • Example: • Result: XY-FSCs are weakly indecomposable • Capacity: