Download
1 / 1
10 likes | 99 Vues
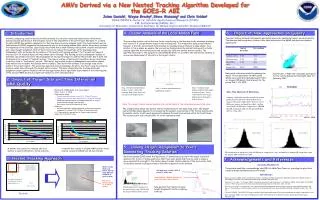
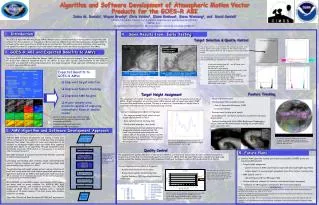
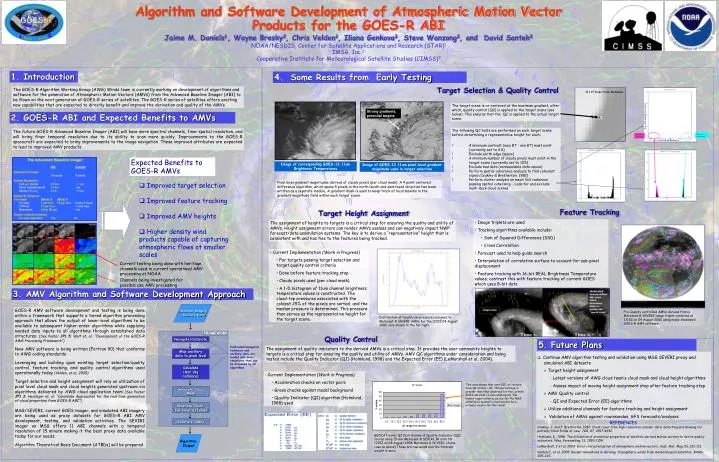
15 x 15 Target Scene Radiances. Strong gradients, potential targets. X. Image of GOES-12 11um pixel-level gradient magnitude used in target selection. Image of corresponding GOES-12 11um Brightness Temperatures.

E N D
15 x 15 Target Scene Radiances Strong gradients, potential targets X Image of GOES-12 11um pixel-level gradient magnitude used in target selection Image of corresponding GOES-12 11um Brightness Temperatures Pre-Quality controlled AMVs derived from a Meteosat-8 SEVERI image triplet centered at 1215Z on 04 August 2006 using newly developed GOES-R AMV software. This case shows that over 50% of vectors have QI scores > 90. This percentage is greater than that observed for the current GOES satellite (3-axis stabilized). The higher registration accuracy for the MSG satellite (a spinner) is believed to be a primary reason for this result. GEOCAT winds QI Distribution of Quality Indicator (QI) scores using 15-min Meteosat-8 SEVIRI IR data for 1215Z on 04 August 2006 Meteosat-8 SEVERI. (Same case as above) These are raw winds and the forecast weight is zero. Algorithm and Software Development of Atmospheric Motion Vector Products for the GOES-R ABI Jaime M. Daniels1, Wayne Bresky2, Chris Velden3, Iliana Genkova3, Steve Wanzong3, and David Santek3 NOAA/NESDIS, Center for Satellite Applications and Research (STAR)1 IMSG, Inc.2 Cooperative Institute for Meteorological Satellite Studies (CIMSS)3 1. Introduction 4. Some Results from Early Testing Target Selection & Quality Control The GOES-R Algorithm Working Group (AWG) Winds team is currently working on development of algorithms and software for the generation of Atmospheric Motion Vectors (AMVs) from the Advanced Baseline Imager (ABI) to be flown on the next generation of GOES-R series of satellites. The GOES-R series of satellites offers exciting new capabilities that are expected to directly benefit and improve the derivation and quality of the AMVs. The target scene is re-centered at the maximum gradient, after which, quality control (QC) is applied to the target scene (see below). This ensures that the QC is applied to the actual target scene. Local Standard Deviation 2. GOES-R ABI and Expected Benefits to AMVs The following QC tests are performed on each target scene before determining a representative height for each: ! A minimum contrast (max BT - min BT) must exist (currently set to 4 K) ! Exclude earth edge (space) ! A minimum number of cloudy pixels must exist in the target scene (currently set to 10%)! Exclude bad data (unreasonable data values) ! Perform spatial coherence analysis to find coherent signal (Coakley & Bretherton, 1982)! Perform cluster analysis on mean 3x3 radiances passing spatial coherency - Look for and exclude multi-deck cloud scenes The future GOES-R Advanced Baseline Imager (ABI) will have more spectral channels, finer spatial resolution, and will bring finer temporal resolution due to its ability to scan more quickly. Improvements to the GOES-R spacecraft are expected to bring improvements to the image navigation. These improved attributes are expected to lead to improved AMV products. Coherent warm signal Coherent cold signal Local Mean Radiance Expected Benefits to GOES-R AMVs Pixel level gradient magnitudes derived at cloudy pixels (per cloud mask). A 4 point centered difference algorithm, which spans 5 pixels in the north/south and east/west direction has been written as a separate module. A gradient mask is used to keep track of local maxima in the gradient magnitude field within each target scene. • Improved target selection • Improved feature tracking • Improved AMV heights • Higher density wind products capable of capturing atmospheric flows at smaller scales Feature Tracking Target Height Assignment • Image triplets are used • Tracking algorithms available include: • Sum of Squared Differences (SSD) • Cross Correlation • Forecast used to help guide search • Interpolation of correlation surface to account for sub-pixel displacement • Feature tracking with 16-bit REAL Brightness Temperature values; contrast this with feature tracking of current GOES which uses 8-bit data The assignment of heights to targets is a critical step for ensuring the quality and utility of AMVs. Height assignment errors can render AMVs useless and can negatively impact NWP forecast/data assimilation systems. The key is to derive a “representative” height that is consistent with and has ties to the features being tracked. • Current Implementation (Work in Progress) • For targets passing target selection and target quality control criteria • Done before feature tracking step • Cloudy pixels used (per cloud mask) • A 1-D histogram of 11um channel brightness temperature values is constructed. The cloud-top pressures associated with the coldest 25% of the pixels are sorted and the median pressure is determined. This pressure then serves as the representative height for the target scene. Current testing being done with heritage channels used in current operational AMV processing at NOAA Channels being investigated for possible use AMV processing 3. AMV Algorithm and Software Development Approach -Satellite Imagery -Ancillary Data GOES-R AMV software development and testing is being done within a framework that supports a tiered algorithm processing approach that allows the output of lower-level algorithms to be available to subsequent higher-order algorithms while supplying needed data inputs to all algorithms through established data structures. (See Poster JP1.5; Wolf et. al.: “Development of the GOES-R AWG Processing Framework”) New AMV software is being written (Fortran 90) that conforms to AWG coding standards Leveraging and building upon existing target selection/quality control, feature tracking, and quality control algorithms used operationally today (Velden, et al, 2005) Target selection and height assignment will rely on utilization of pixel level cloud mask and cloud heights generated upstream via algorithms delivered by AWG cloud application team (See Poster JP1.3; Heidinger et. al: “Candidate Approaches for the real-time generation of cloud properties from GOES-R ABI”) MSG/SEVERI, current GOES imager, and simulated ABI imagery are being used as proxy datasets for GOES-R ABI AMV development, testing, and validation activities. The SEVIRI imager on MSG offers 11 ABI channels with a temporal resolution of 15 minute making it the best proxy data available today for our needs. Algorithm Theoretical Basis Document (ATBDs) will be prepared Distribution of heights (in pressure) assigned to Meteosat-8 SEVERI AMVs for the 1215Z 04 August 2006 case shown to the far right. FRAMEWORK Quality Control Navigate/Calibrate 5. Future Plans Calibrated/navigated radiances and ancillary data are loaded into data structures that can be accessed by all algorithms The assignment of quality indicators to the derived AMVs is a critical step. It provides the user community heights to targets is a critical step for ensuring the quality and utility of AMVs. AMV QC algorithms under consideration and being tested include the Quality Indicator (QI) (Holmlund, 1998) and the Expected Error (EE) (LeMarshall et al, 2004). Map ancillary data to pixel level • Continue AMV algorithm testing and validation using MSG SEVERI proxy and simulated ABI datasets • Target height assignment • Latest versions of AWG cloud team’s cloud mask and cloud height algorithms • Assess impact of moving height assignment step after feature tracking step • AMV Quality control • QI and Expected Error (EE) algorithms • Utilize additional channels for feature tracking and height assignment • Validation of AMVs against rawinsondes, GFS forecasts/analyses Calculate clear sky radiances • Current Implementation (Work in Progress) • Acceleration checks on vector pairs • Gross checks against model background • Quality Indicator (QI) algorithm (Holmlund, 1988) used Generate Cloud Mask Generate Cloud-Top Heights/Temps Generate AMVs REFERENCES Coakley, J. and F. Bretherton, 1982: Cloud cover from high-resolution scanner data: detecting and allowing for partially filled fields of view. JGR, 87, 4917-4932 Holmlund, K., 1988: The utilization of statistical properties of satellite-derived motion vectors to derive quality indicators. Wea. Forecasting, 13, 1093-1104. LeMarshall, J et al, 2004: Error characterization of atmospheric motion vectors, Aust. Met. Mag, 51, 123-131. Velden C., et al, 2005: Recent innovations in deriving tropospheric winds from meteorological satellites. BAMS, 205-223. Algorithm Output