Download
1 / 9
100 likes | 269 Vues
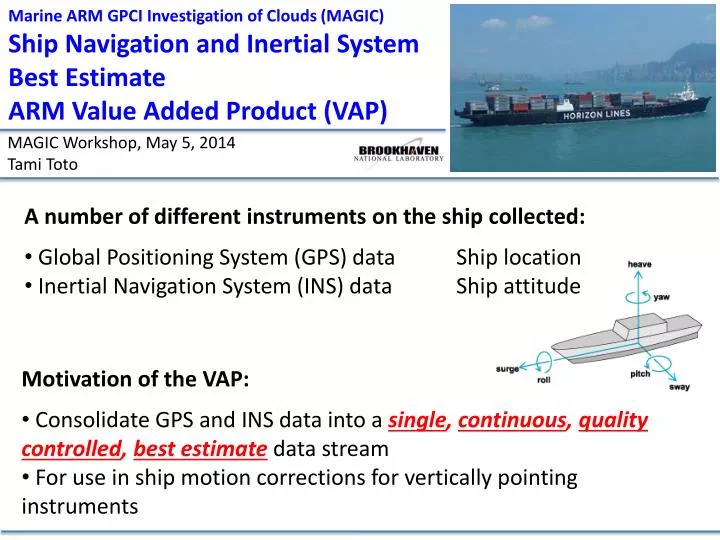
Marine ARM GPCI Investigation of Clouds (MAGIC) Ship Navigation and Inertial System Best Estimate ARM Value Added Product (VAP). MAGIC Workshop, May 5, 2014 Tami Toto. A number of different instruments on the ship collected: Global Positioning System (GPS) data Ship location

E N D
Marine ARM GPCI Investigation of Clouds (MAGIC) Ship Navigation and Inertial System Best Estimate ARM Value Added Product (VAP) MAGIC Workshop, May 5, 2014 Tami Toto • A number of different instruments on the ship collected: • Global Positioning System (GPS) data Ship location • Inertial Navigation System (INS) data Ship attitude • Motivation of the VAP: • Consolidate GPS and INS data into a single, continuous, quality controlled, best estimatedata stream • For use in ship motion corrections for vertically pointing instruments
Ship Navigation and Inertial System Best Estimate VAP Magic Navigation Best Estimate (MAGNAVBE) Data Object Description (DOD) Time Resolution: 10 Hz and 1-minute products • Inertial Navigation System (INS) Variables: • Roll, pitch, yaw, and associated angular rates • Surge, sway, heave, and associated velocities and accelerations • Vertical beam angle and orientation calculated from roll and pitch and yaw • Global Positioning System (GPS) Variables: • Latitude, longitude, and altitude • Course over ground • Speed over ground • Other Variables: • MAGIC leg number and letter (A/B) • “En route” flag The 1-minute product will contain the variables listed above, and additionally, it will include means and standard deviations for all quantitative variables.
Ship Navigation and Inertial System Best Estimate VAP On-board GPS & INS Instrumentation Instrument Provision • Seaborne Navigation System (SEANAV) Complete INS, GPS • 2 Watson Tilt Sensors Limited INS • MWACR Complete INS Pitch Roll • KAZR (mounted to ship) Limited INS • MET, PRP, ISAR components Limited INS, GPS Note: There was another table available, RPHTILT, but its data stream is not useful MWACR Radar SEANAV RPH Control Table OR Watson Tilt
Ship Navigation and Inertial System Best Estimate VAP Magic Navigation Best Estimate (MAGNAVBE) Data Object Description (DOD) Time Resolution: 10 Hz and 1-min products • Inertial Navigation System (INS) Variables: • Roll, pitch, yaw, and associated angular rates • Surge, sway, heave, and associated velocities and accelerations • Vertical beam angle and orientation calculated from roll and pitch and yaw ✔ • Global Positioning System (GPS) Variables: • Latitude, longitude, and altitude • Course over ground • Speed over ground • Other Variables: • MAGIC leg number and letter (A/B) • “En route” flag The 1-minute product will contain the variables listed above, and additionally, it will include means and standard deviations for all quantitative variables.
Ship Navigation and Inertial System Best Estimate VAP There are gaps in primary data source: SEANAV Pitch, Roll, Yaw A B • SEANAV (10 Hz) • Missing Data Leg Number Days into cruise
Ship Navigation and Inertial System Best Estimate VAP Filling the gaps with secondary source Pitch, Roll, Yaw A B • SEANAV (10 Hz) • Watson Tilt Sensor (10 Hz) • Gets us roll, pitch, yaw • But not heave • Missing Data Leg Number Ship lost power Days into cruise
Ship Navigation and Inertial System Best Estimate VAP Filling the gaps with other sources Pitch, Roll A B • SEANAV (10 Hz) • Watson Tilt Sensor (10 Hz) • Gets us roll, pitch, yaw • But not heave • MWACR (~0.2 s) • Has roll, pitch, heave • KAZR (~0.4 s) or • MET, PRP, ISAR (1-5s) • Gets us roll, pitch • But lower time resolution • than SEANAV or Watson Leg Number ---------------------MWACR ---------------------------------- • Missing Data Days into cruise
Ship Navigation and Inertial System Best Estimate VAP Further analysis required to determine BEST source(s) for remaining gaps • KAZR can possibly provide pitch and roll Leg 17A Leg 17A • Speculation that the MWACR could provide pitch, roll and heave during times when the table was out KAZR Roll (°) KAZR Pitch (°) • Mike Reynold’s instruments can provide pitch and roll with offsets Leg 18A Leg 18A • Christopher Williams was able to estimate ship heave using a vertically pointing W-band radar during VOCALS 2008 SEANAV Pitch (°) SEANAV Roll (°)
Ship Navigation and Inertial System Best Estimate VAP When will it be available? • VAP is currently under development • Hoping to release an evaluation product by July 2014 • If you would like to be a first user of the product, please let me know: • Tami Toto: ttoto@bnl.gov