Download

1 / 36
390 likes | 609 Vues
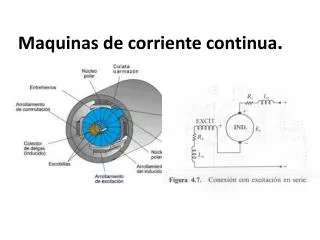
DRIVES DE CORRIENTE DIRECTA. Ecuaciones parte eléctrica. Ecuaciones parte mecánica. Vf = Voltaje aplicado al circuito de campo. Rfw = Resistencia del embobinado de campo. Rfc = Resistencia de control para variar corriente de campo. Lf = Inductancia del embobinmado de campo.

E N D
Ecuaciones parte eléctrica Ecuaciones parte mecánica
Vf = Voltaje aplicado al circuito de campo. Rfw = Resistencia del embobinado de campo. Rfc = Resistencia de control para variar corriente de campo. Lf = Inductancia del embobinmado de campo. Vta = Voltaje en terminales aplicado al embobinado de armadura. Ra = Resistencia de armadura. (incluye embobinado, escobillas y resistencia de contacto con conmutador y todo lo que esta en serie con armadura). La = Inductancia del embobinado de armadura y elementos en serie. E = Voltaje inducido debido al movimiento de conductores en el rotor al cortar líneas de flujo de los polos (fuerza electromotriz)
Td = Par producido por el motor debido a la corriente de los conductores del rotor al interactuar con el campo magnético producido por el embobinado de campo. J = Momento de inercia de motor y carga. B = Coeficiente de fricción viscosa. TL = Par de la carga que mueve el motor. Ka F = Función no lineal de la corriente del emobinado de campo (despreciaremos en este caso el efecto desmagnetizante de reacción de armadura), este frecuentemente se lineariza y se expresa como Kf If (especialmente en aplicaciones de control).
Característica de magnetización típica de una máquina de C. D. Ka F
La característica anterior por lo general se obtiene experimentalmente haciendo trabajar a la máquina de C. D. como generador a velocidad constante sin carga y midiendo el voltaje en terminales a medida que se cambia la corriente de campo y se le conoce como característica de magnetización o en vacío.
Para análisis de estado estable las ecuaciones anteriores se simplifican a:
En un motor de C. D. nos interesa la característica de como varia la velocidad al cambiar el par. (w vs Td). La anterior se puede obtener de la ecuaciones anteriores por substitución.
Mediante substitución obtenemos: La última ecuación representa una línea recta, donde se muestran las variables que se pueden usar para controlar la velocidad. Básicamente control de Vta y control de Ka F, aunque también se podría incluir control con resistencia externa si se agrega en serie con Ra
Para este último caso la ecuación se modifica a: Tomemos un ejemplo para ver las alternativas. Consideremos un motor con Vt=100 Ra=0.2 W y Ka F =Ka Fi =1. Analizando cambios de estas tres cantidades y suponiendo la carga de un abanico con característica TL=0.003 w2 . En resúmen las siguientes variantes: a) Cambiar el voltaje aplicado a la armadura a 90V, 100V y 110V b) Cambiar el flujo para tener valores de KaFi de 0 .8, 1.0 y 1.2 c) Agregar resistencia externa de 0, 0.2 W y 0.4 W
Control con Flujo o de Potencia constante Control con Vt o de Par constante
Frenado de motores de C. D. Cuando un control desea cambiar la velocidad de un valor alto a uno bajo o invertir el sentido de giro frecuentemente se implementan técnicas de frenado. Existen tres técnicas: frenado dinámico, frenado regenerativo y frenado por inversión de voltaje (plugging)
En el frenado dinámico se quita la fuente de la armadura y en su lugar se conecta una resistencia. Se hace que el motor opere como generador y por lo tanto se frena. La energía cinética del motor se convierte en eléctrica y la mayor parta se disipa en la resistencia.
En el frenado regenerativo el voltaje de la fuente de alimentación se reduce y se obliga al motor a pasar a operar como generador y se frena. En este caso la energía cinética se convierte a eléctrica y una buena parte se regresa a la fuente de alimentación. La fuente debe tener esta capacidad de recibir energía.
Frenado por inversión del voltaje de alimentación (plug). En este caso se invierte la polaridad de la fuente la cual provoca inversión de la corriente. El motor opera como generador y se frena. Para no dañar la máquina se debe limitar la corriente a un valor adecuado (menor a 2 Inominal) mediante resistencia en serie
En los esquemas vistos se necesita tener fuentes con capacidad de proporcionar tanto voltaje positivo como negativo, así como corriente positiva como negativa. El semiconvertidor solo opera con voltaje positivo y corriente positiva, mientras que el convertidor completo puede dar voltaje positivo y negativo pero solo corriente positiva. Se necesita de convertidores que puedan trabajar en los cuatro cuadrantes. Estos se pueden implementar con dos convertidores completos, uno para corriente positiva y el otro para corriente negativa. A estos convertidores se les llama convertidores duales.
CONVERTIDOR DUAL MONOFASICO En este esquema el convertidor dual opera aplicándole señales de disparo solamente a un convertidor, el que debe de conducir la corriente. Convertidor P para corriente positiva o convertidor N para corriente negativa. Para que los dos convertidores proporcionen el mismo voltaje promedio se requiere ap + an =p
CONVERTIDOR DUAL MONOFASICO CON CORRIENTE CIRCULANTE En este esquema el convertidor dual opera aplicándole señales de disparo a los dos convertidores. Para que los dos convertidores proporcionen el mismo voltaje promedio se requiere ap + an =p. Pero los voltajes instantáneos no son iguales por lo que se requiere de un reactor entre los dos convertidores para limitar la corriente circulante.
Con el convertidor dual se puede implementar la operación en los cuatro cuadrantes, tanto para giro normal como para implementar frenado. Vdc Operación del motor para giro positivo Frenado del motor para giro positivo. Idc Operación del motor para giro negativo Frenado del motor para giro negativo
En el sistema Ward Leonard mostrado en la figura anterior se pueden implementar dos esquemas básicos para controlar velocidad: a) Control de Voltaje. Variando la corriente de campo del generador de C. D.(con Rfg) se puede modificar el voltaje de salida del generador que es el voltaje aplicado al motor. B) Control de flujo. Variando la corriente de campo del motor de C. D. (con Rfm) se puede modificar el flujo del motor.
El inconveniente de este esquema es que requiere de mucho equipo para controlar la velocidad del Motor. El generador usado debe ser de un poco mayor capacidad del motor cuya velocidad se desea controlar y el motor de inducción que mueve el generador debe ser de un poco mayor capacidad que el generador. Adicionalmente se necesita de una fuente de C. D. separada para alimentar los campos. El el esquema mostrado esta fuente se logra con un pequeño generador (excitador) que opera en forma autoexcitada.
La estructura básica del sistema Ward Leonard se uso durante mucho tiempo para implementar un sistema de control retroalimentado para controlar velocidad. En este esquema se usa un sensor de velocidad (pude ser un tacómetro) que proporcione un voltaje proporcional a velocidad y esta señal se compara con una señal de referencia que fija la velocidad deseada. De esta comparación se obtiene una señal de error que se aplica a un controlador-amplificador que controlara la corriente de campo del generador, que a su vez determina el voltaje aplicado al motor. Si se presenta un incremento de carga, la velocidad bajaría y al hacerlo provocaría una señal de error mayor y esta incrementaría la corriente de campo del generador que a su vez incrementa el voltaje aplicado al motor para hacer aumentar su velocidad.
En esquemas de control mas modernos se usan varios lazos de control para mantener la velocidad constante. Lazo de control de velocidad que fija una corriente de referencia deseada en el motor (estableciendo un límite para no dañarlo). Lazo de control de corriente que hace que por el motor circule una corriente igual a la establecida por el lazo de control de velocidad. Lazo de control de corriente de campo, cuyo propósito es el de debilitar el campo cuando se desee tener una velocidad en el motor mayor a la velocidad base.
Para analizar un sistema de control se requiere ver su comportamiento dinámico, que es tema de estudio de los cursos de control. Nos interesa saber si la operación dinámica no causa problemas de estabilidad. Para poder hacer esto es necesario modelar el motor para análisis transitorio y esto requiere estudiar sus ecuaciones diferenciales y su interacción con los controles. A continuación se describirán la forma de modelar el motor usando la transformada de Laplace y funciones de transferencia.
Vf(s) If(s) Circuito de campo, cuando se use control de campo.
Vta(s) Ia(s) Circuito de armadura, cuando se use control de voltaje en terminales y suponiendo el flujo constante.
Wm(s) TL(s) Analizando la parte mecánica, considerando el flujo constante
Vta(s) Ia(s) Wm(s) TL(s) TL(s) Wm(s) Vta(s) Juntando la armadura y la parte mecánica Diagrama simplificado MCD(s) Modelo de función de transferencia de Motor de Corriente Directa y su carga con Flujo Constante
TL Verror MCD Vref Control de Velocidad CONVERTIDOR Vta Vc Sensor de velocidad La función de transferencia del motor se puede combinar con los demás elementos de control para formar un sistema de control retroalimentado con un convertidor. Fuente de Energía de C. A. Wm