Download
1 / 13
130 likes | 308 Vues
Sur retour unitaire. K. +. -. Si on pose. Alors, sur retour unitaire. Soit sous forme canonique :. La courbe demandée est:. Il faut ajouter +6,02dB pour être en limite de stabilité.

E N D
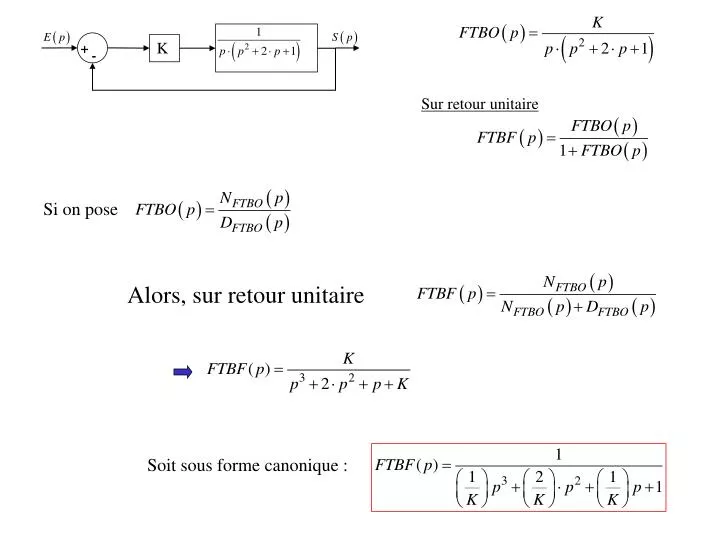
Sur retour unitaire K + - Si on pose Alors, sur retour unitaire Soit sous forme canonique :
Il faut ajouter +6,02dB pour être en limite de stabilité Lorsque l’on augmente le gain de la FTBO, on translate son lieu de Black selon les ordonnées.(L’ajout de gain n’ajoute pas de déphasage supplémentaire dans la boucle) Quel gain K1?
Il faut abaisser la courbe de 5dB pour obtenir la marge de phase souhaitée
Ajouter –4dB, c’est multiplier par 0,63 Pour un gain de 1, la marge de gain est de 6dB Si on veut un marge de gain de 10dB, il faut translater le lieu de 4dB vers le bas. C’est à dire ajouter -4dB dans la boucle
On détermine graphiquement qu’il faut abaisser le lieu de 6dB. • L’abaque de Black est constitué de 2 systèmes de coordonnées: • un système de coordonnées (cartésien) relatif à la BO • un système de coordonnées relatif à la BF (courbes paramétrées en dB et en ° de déphasage). Il faut ici déterminer le gain qui translate la courbe obtenue de telle sorte qu’elle tangente la courbe +2,3dB dans le système de coordonnée BF. On a ainsi un gain maximal de +2,3dB en BF
Pour K=0,5, le lieu de black obtenu est identique à celui obtenu à la question n°2, décalée de –6dB.
Erreur de position= Erreur statique Ayant un intégrateur en BO, il n’y a pas d’erreur statique…
Erreur de vitesse = Erreur de traînage 200% d’erreur de vitesse. C’est très important…
Influence de le réduction de l’erreur de traînage pour Marge de stabilité insuffisante On a
Correcteur Proportionnel Dérivé. Pour avoir Il faut prendre Boucler un système ne peut augmenter son ordre.. Il faut donc avoir un système du 2iéme ordre en BO Par identification à la forme canonique des systèmes du 2ieme ordre :