Download
1 / 1
10 likes | 154 Vues
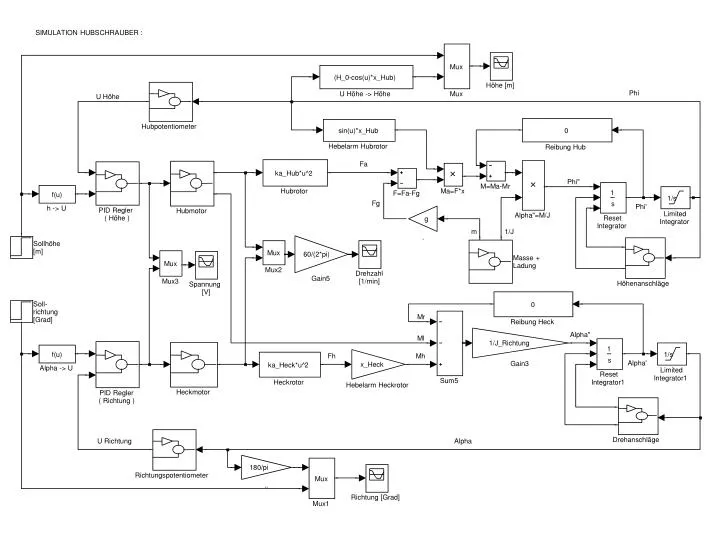
SIMULATION HUBSCHRAUBER :. Mux. (H_0-cos(u)*x_Hub). Höhe [m]. Phi. U Höhe -> Höhe. Mux. U Höhe. Hubpotentiometer. sin(u)*x_Hub. 0. Hebelarm Hubrotor. Reibung Hub. Fa. ka_Hub*u^2. Phi". M=Ma-Mr. Hubrotor. Ma=F*x. 1. F=Fa-Fg. f(u). 1/s. Fg. s. Phi'. h -> U. PID Regler.

E N D
SIMULATION HUBSCHRAUBER : Mux (H_0-cos(u)*x_Hub) Höhe [m] Phi U Höhe -> Höhe Mux U Höhe Hubpotentiometer sin(u)*x_Hub 0 Hebelarm Hubrotor Reibung Hub Fa ka_Hub*u^2 Phi" M=Ma-Mr Hubrotor Ma=F*x 1 F=Fa-Fg f(u) 1/s Fg s Phi' h -> U PID Regler Hubmotor Limited Alpha"=M/J ( Höhe ) Reset g Integrator Integrator m 1/J . Sollhöhe [m] Mux 60/(2*pi) Masse + Mux Ladung Mux2 Drehzahl Gain5 Mux3 [1/min] Höhenanschläge Spannung [V] Soll- 0 richtung Mr [Grad] Reibung Heck Alpha" Ml 1/J_Richtung 1 f(u) 1/s Fh Mh s Alpha' Gain3 x_Heck ka_Heck*u^2 Alpha -> U Limited Reset Integrator1 Sum5 Heckrotor Integrator1 Hebelarm Heckrotor Heckmotor PID Regler ( Richtung ) Drehanschläge U Richtung Alpha 180/pi Richtungspotentiometer Mux .. Richtung [Grad] Mux1