Download
1 / 52
640 likes | 891 Vues
ANGKANA. Chapter 3. บัส และอินเทอร์เฟซ ( Bus & Interface ). ANGKANA. หัวข้อการเรียนรู้. โครงสร้างพื้นฐานของบัส การออกแบบบัส สถาปัตยกรรมของบัสแบบ Bridge มาตรฐานของบัส - PCI - SCSI - AGP - USB - FireWire. บทนำ.

E N D
ANGKANA Chapter 3 บัส และอินเทอร์เฟซ (Bus & Interface)
ANGKANA หัวข้อการเรียนรู้ • โครงสร้างพื้นฐานของบัส • การออกแบบบัส • สถาปัตยกรรมของบัสแบบ Bridge • มาตรฐานของบัส - PCI - SCSI - AGP - USB - FireWire
บทนำ • ข้อมูลที่ถ่ายโอนระหว่างไอโอโมดูล, หน่วยความจำ และซีพียูจะคล้ายกัน การเชื่อมต่อทางกายภาพที่ทำให้ข้อมูลสามารถถ่ายโอนจากแหล่งหนึ่งไปอีกแหล่งหนึ่งในระบบคอมพิวเตอร์เรียกว่า “บัส” (bus) ตัวอย่างที่เห็นได้ชัดของบัสสามารถพบเห็นได้จากเมนบอร์ด (Mainboard) หรือมาเธอร์บอร์ด (Motherboard) ในพีซีที่มีวงจรทางอิเล็กทรอนิกส์อยู่บนแผ่นอโลหะ และมีเส้นทางเป็นโลหะ (ส่วนมากเป็นทองแดง) ที่เรียกว่า “trace” เชื่อมต่อส่วนต่าง ๆ โดยจะออกจากศูนย์กลางที่เป็นโปรเซสเซอร์ • นอกจากนี้บัสยังรวมถึงไมโครชิฟ (microchip) และสล็อตต่าง ๆ (slot) ที่ให้สามารถเพิ่มเติมอุปกรณ์ต่าง ๆ ไปได้เรียกว่า “อะแด๊ปเตอร์” (adapter) และบัสที่เป็นสล็อตนี้เราเรียกว่า “ไอโอบัส”(I/O bus)
โครงสร้างพื้นฐานของบัสโครงสร้างพื้นฐานของบัส • บัสมีการเชื่อมต่อดีไวซ์ตั้งแต่สองดีไวซ์ สามารถส่งข้อมูลไปให้ดีไวซ์อื่นได้ ถ้าต้องการส่งข้อมูลพร้อมกัน จะมีสัญญาณควบคุมให้ดีไวซ์ใดส่งก่อน ดีไวซ์ใดต้องรอ ทำให้ในช่วงเวลาเดียวกันไม่มีดีไวซ์ที่ส่งข้อมูลพร้อมกัน เนื่องจากในระบบคอมพิวเตอร์มีบัสมากมายที่ทำงานได้หลากหลาย โดยบัสที่ทำหน้าที่เชื่อมต่อส่วนหลัก ๆ ของคอมพิวเตอร์ (โปรเซสเซอร์, หน่วยความจำ และไอโอ) เรียกว่า “บัสระบบ” (System bus) • การกระทำกับหน่วยความจำผ่านทางบัสระบบเป็นโอเปอเรชันที่เป็น “สลาฟ” (slave) ถ้าเชื่อมต่อโดยตรงกับบัสระบบทำให้เรียกว่า “มาสเตอร์” (master)
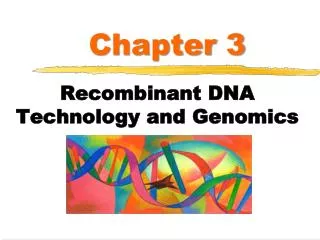
โครงสร้างของบัสในพีซีโครงสร้างของบัสในพีซี
โครงสร้างพื้นฐานของบัสโครงสร้างพื้นฐานของบัส • บัสระบบประกอบด้วยบัส 3 กลุ่มคือ • แอ็ดเดรสบัส (address bus) มี 8 – 32 เส้น ทำหน้าที่ส่งแอ็ดเดรสของข้อมูลที่จะเก็บลงในหน่วยความจำ หรือแอ็ดเดรสของไอโอ • ดาต้าบัส (data bus) มี 16 – 128 เส้น ทำหน้าที่ส่งข้อมูลไปตามบัส • คอนโทรลบัส (control bus) มี 10 เส้น ทำหน้าที่ควบคุมรูปแบบการส่งข้อมูลและควบคุมดีไวซ์ที่จะทำการรับส่งข้อมูล
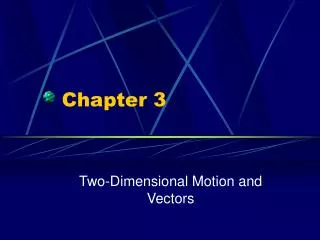
โครงสร้างของบัสระบบของโปรเซสเซอร์ PowerPC 603
โครงสร้างพื้นฐานของบัสโครงสร้างพื้นฐานของบัส • หลักในการใช้บัสระบบ ก็คือความเร็วสูงในการถ่ายโอนข้อมูลระหว่างโปรเซสเซอร์และหน่วยความจำ ส่วนไอโอดีไวซ์ที่ส่วนมากจะทำงานได้ช้ากว่าโปรเซสเซอร์ หรือหน่วยความจำ เนื่องจากเป็นอินเทอร์เฟซภายนอกที่แตกต่างจากบัสระบบ
คอมพิวเตอร์ที่มีบัสระบบและไอโอบัสคอมพิวเตอร์ที่มีบัสระบบและไอโอบัส
โครงสร้างพื้นฐานของบัสโครงสร้างพื้นฐานของบัส • บัสแบบ SCSI (Small Computer System Interface) ที่กำหนดโดยองค์กร American National Standards Institute (ANSI) บัสนี้เชื่อมต่อกับไอโอดีไวซ์ เช่น ฮาร์ดดิสก์, เครื่องพิมพ์ กับคอมพิวเตอร์ โครงสร้างบัส SCSI
การออกแบบบัส • มีสิ่งที่ต้องพิจารณา 6 ประการ คือ • ประเภทของบัส • การควบคุมบัส • รูปแบบการเข้าจังหวะ • ขนาดบัส • ประเภทการถ่ายโอนข้อมูล • Split transaction
การออกแบบบัส ประเภทของบัส บัสแบ่งออกได้เป็น 2 ประเภท คือ dedicated ซึ่งเป็นบัสที่มีการกำหนดหน้าที่ไว้อย่างชัดเจน และถาวร ซึ่งจะเห็นได้ชัดคือบัสย่อยในระบบคอมพิวเตอร์ เช่น แอ็ดเดรสบัส, ดาต้าบัส หรือคอนโทรลบัสที่จะทำหน้าที่กำหนดแอ็ดเดรส, ส่งข้อมูล และสัญญาณควบคุม ตามลำดับ ส่วนบัสอีกประเภทหนึ่งคือ multiplexed ซึ่งเป็นบัสที่สามารถทำหน้าที่ได้หลายอย่าง ไม่มีการกำหนดอย่างชัดเจนและถาวร การทำหน้าที่อะไรนั้นขึ้นอยู่กับสัญญาณควบคุม วิธีการที่ใช้บัสเดียวกันส่งได้ทั้งแอ็ดเดรสและข้อมูล โดยมีสัญญาณควบคุมกำหนดประเภทของข้อมูลที่ส่งไป และกำหนดเป็นช่วงเวลาในการส่งนี้ว่า “time multiplexing”
การออกแบบบัส ประเภทของบัส ข้อดีของการส่งแบบ time multiplexing 1. จำนวนสายสัญญาณที่ต้องการใช้จะน้อยกว่า 2. ประหยัดค่าใช้จ่าย และประหยัดเนื้อที่บนแผงวงจร ข้อเสียของการส่งแบบ time multiplexing 1. วงจรในแต่ละโมดูลจะมีความซับซ้อนมากกว่าเดิม 2. ประสิทธิภาพของระบบอาจจะลดต่ำลง
การออกแบบบัส ประเภทของบัส ข้อดีของการใช้บัสแบบ dedicated 1. ประสิทธิภาพการทำงานดีกว่า 2. แต่ละดีไวซ์มีบัสเป็นของตนเองที่กำหนดแน่นอนถาวรโดยมีคอนโทรลเลอร์แต่ละชุดควบคุมการทำงาน 3. ดีไวซ์ทำงานได้ทันที ไม่จำเป็นต้องหยุดรอให้ดีไวซ์อื่นทำงานเสร็จไปก่อน ข้อเสียของการใช้บัสแบบ dedicated 1. ขนาดของแผงวงจรจะมีขนาดใหญ่ 2. ใช้บัสหรือสายสัญญาณเป็นจำนวนมาก 3. ค่าใช้จ่ายสูง
การออกแบบบัส การควบคุมบัส การตัดสินพิจารณาได้จากรูปแบบที่เป็นแบบรวมศูนย์ (Centralized) หรือแบบกระจายศูนย์ (Distributed) ในแบบรวมศูนย์จะมีดีไวซ์ที่เรียกว่า “คอนโทรลเลอร์ (Controller) หรือ “อาร์บิเตอร์” (Arbiter) อาจจะเป็นหน่วยแยกหรือรวมอยู่กับโปรเซสเซอร์ก็ได้ โดยดีไวซ์นี้มีหน้าที่จัดสรรเวลาการใช้บัสให้กับดีไวซ์อื่นที่ร้องขอมา แต่ในแบบกระจายศูนย์จะไม่มีคอนโทรลที่คอยควบคุมการใช้บัส แต่ละมีวงจรพิเศษที่เรียกว่า “แอ็กเซสคอนโทรลลอจิก” (Access Control Logic) อยู่ในตัวเอง และจะทำงานร่วมกันในการแบ่งการใช้บัสร่วมกัน จะเห็นได้ว่าทั้งแบบรวมศูนย์ และกระจายศูนย์มีจุดประสงค์เหมือนกันคือการเลือกว่าดีไวซ์ใด (โปรเซสเซอร์หรือไอโอโมดูล) เป็นมาสเตอร์ (master) ซึ่งจะใช้สิทธิ์ในการส่งข้อมูลไปยังดีไวซ์ที่เป็นสลาฟ (slave)
การออกแบบบัส รูปแบบการเข้าจังหวะ การเข้าจังหวะมี 2 แบบคือ “ซิงโครนัส” (Synchronous) และ”อะซิงโครนัส” (Asynchronous) ในบัสที่เป็นซิงโครนัสจะมีดีไวซ์หนึ่งบนบัสนั้นที่มีเครื่องกำเนิดสัญญาณนาฬิกา และทำหน้าที่ส่งชุดสัญญาณ 0 และ 1 ในช่วงเวลา สัญญาณนาฬิกาของบัสที่มีความถี่ 100 เมกะเฮิร์ตซ์
ไดอะแกรมของการอ่านหน่วยความจำแบบซิงโครนัสไดอะแกรมของการอ่านหน่วยความจำแบบซิงโครนัส
การออกแบบบัส รูปแบบการเข้าจังหวะ บัสแบบอะซิงโครนัสซึ่งจะมีความซับซ้อนกว่าเนื่องจากจะไม่มีสัญญาณนาฬิกาของบัส ดีไวซ์ที่เป็นมาสเตอร์ของบัสแบบอะซิงโครนัสจะวางทุกสิ่งที่ต้องการลงบนบัส (แอ็ดเดรส, ดาต้า และคอนโทรล) และกำหนด MSYN (master synchronization) ดีไวซ์ที่เป็นสลาฟจะทำงานของตนและเมื่อเสร็จสิ้นจะกำหนด SSYN (slave synchronization) หลังจากนั้นดีไวซ์ที่เป็นมาสเตอร์จะปลดปล่อย MSYN แล้วส่งสัญญาณไปปลดปล่อย SSYN
ไดอะแกรมของการอ่านหน่วยความจำแบบอะซิงโครนัสไดอะแกรมของการอ่านหน่วยความจำแบบอะซิงโครนัส
การออกแบบบัส รูปแบบการเข้าจังหวะ
การออกแบบบัส รูปแบบการเข้าจังหวะ การปฏิสัมพันธ์แบบต่อเนื่อง (Synchronous) เป็นการปฏิสัมพันธ์ที่เกิดขึ้นทันทีทันใด (Real Time) มีปฏิกิริยาสนองกลับ(Feedback) ในเวลาเดียวกันและทันทีทันใด ซึ่งมีความสำคัญมากสำหรับการเรียนเป็นกลุ่ม ตัวอย่างเทคโนโลยีที่นำมาใช้ในการปฏิสัมพันธ์ลักษณะนี้ ได้แก่ Audio Conference, Video Conference หรือ Chat
การออกแบบบัส รูปแบบการเข้าจังหวะ
การออกแบบบัส รูปแบบการเข้าจังหวะ การปฏิสัมพันธ์แบบตามอัธยาศัย (Asynchronous) เป็นการปฏิสัมพันธ์ที่ถูกหน่วงเวลาออกไป ซึ่งผู้เรียนจำเป็นต้องเรียนพร้อมกันดังนั้นผู้เรียนจึงสามารถควบคุมเวลาการเรียนตามสภาพแวดล้อมที่เหมาะสมกับตน ตัวอย่างของเทคโนโลยีที่นำมาใช้ในการปฏิสัมพันธ์ในลักษณะนี้ได้แก่ Webboard หรือ e-mail
การออกแบบบัส ขนาดของบัส แอ็ดเดรสบัสมีผลกระทบกับความจุของระบบ คือถ้าแอ็ดเดรสบัสมีความกว้าง (หรือมีจำนวน) มาก ๆ ก็จะทำให้สามารถอ้างอิงแอ็ดเดรสได้มาก แต่สำหรับดาต้าบัสจะมีผลกระทบกับประสิทธิภาพและความเร็วของระบบ นั่นก็คือยิ่งดาต้าบัสมีความกว้าง (หรือมีจำนวน) มากเท่าไรก็จะยิ่งทำให้การถ่ายโอนข้อมูลทำได้ดี ทำให้ระบบมีประสิทธิภาพสูงขึ้นนั่นเอง
การออกแบบบัส การถ่ายโอนข้อมูล บัสสามารถสนับสนุนประเภทการถ่ายโอนข้อมูลได้หลากหลาย ซึ่งในบางระบบมีการใช้งานบัสในลักษณะผสม เช่น แบบ อ่าน-ปรับเปลี่ยน-เขียน (read-modify-write) ที่ทำการอ่านข้อมูลขึ้นมาแล้วทำการปรับเปลี่ยนบนข้อมูลนั้นแล้วเขียนกลับทันที ทำให้การทำงานในลักษณะนี้เป็นการทำงานในจังหวะเดียวกัน ไม่สามารถแยกจากกันได้ ส่วนการอ่านหลังการเขียนข้อมูล (read-after-write) เป็นอีกการทำงานหนึ่งที่ไม่สามารถแยกจากกันได้ การทำงานในลักษณะนี้เป็นการตรวจสอบข้อมูลที่เขียนไปแล้วว่าเกิดข้อผิดพลาดอะไรหรือไม่
ประเภทการถ่ายโอนข้อมูลที่บัสสนับสนุนประเภทการถ่ายโอนข้อมูลที่บัสสนับสนุน
การออกแบบบัส Split transaction ส่วนนี้จะมีความสัมพันธ์กับบัสมาสเตอร์ (bus master) บัสแบบ Split transaction
การออกแบบบัส Split transaction *** ในการออกแบบระบบบัสจะต้องพิจารณาว่าต้องการมีประสิทธิภาพสูง ซึ่งต้องเสียค่าใช้จ่ายสูงกว่าปกติ หรือต้องการแบบค่าใช้จ่ายต่ำ สิ่งที่ต้องพิจารณาในการออกแบบ มีดังนี้
สถาปัตยกรรมของบัสแบบ Bridge
มาตรฐานของบัส PCI PCI (peripheral Component Interconnect) เป็นโลคอลบัสแบบหนึ่งซึ่งเป็นระบบบัสที่มีการเชื่อมต่อโดยตรงระหว่างบัสของโปรเซสเซอร์และโลคอลบัส ทำให้มีอัตราเร็วและขนาดของบิตข้อมูลเท่ากัน ข้อดี คือ ไม่ต้องใช้ไฟโดยตรงจากบัสของไมโครโปรเซสเซอร์ทำให้สามารถมีจำนวนสล็อตของ PCI ได้มากกว่า ส่วนขนาดบิตข้อมูลของ PCI จะมีทั้งแบบ 32 บิต และ 64 บิต ทำให้ลดปัญหาคอขวด PCI จึงเหมาะสำหรับใช้งานที่เกี่ยวข้อกับกราฟิกและมัลติมีเดีย
มาตรฐานของบัส PCI สัญญาณของบัสแบบ PCI มาตรฐาน
มาตรฐานของบัส คุณสมบัติที่สำคัญของ PCI • มีอัตราเร็ว 2 แบบ คือ 33 และ 66 เมกะเฮิร์ต ปัจจุบันบนเมนบอร์ดมีสล็อต สูงสุด 5 สล็อตสำหรับติดตั้งอุปกรณ์ และสามารถรองรับการทำงานของ การ์ด PCI แบบบัสมาสเตอร์ (สนับสนุนการถ่ายโอนข้อมูลความเร็วสูง โดย ไม่ผ่าน DMA) เช่น SCSI หรือ LAN card เป็นต้น • ความกว้างของดาต้าบัสมีทั้งแบบ 32 และ 64 บิต โดยมีแบนด์วิธสูงสุดที่ 533 เมกะบิตต่อวินาที และสามารถถ่ายโอนข้อมูลในรูปแบบของ Burst Mode • แรงดันไฟฟ้าที่ใช้กับบัสแบบ PCI นี้มี 2 แบบคือ ใช้แรงดันไฟฟ้าขนาด +3.3 โวลต์ สำหรับเครื่องพีซีทั่วไป และแรงดันขนาด +5 โวลต์ สำหรับ คอมพิวเตอร์ที่ใช้ซีพียูแบบ RISC เช่น Alpha ของ DEC เป็นต้น
มาตรฐานของบัส คุณสมบัติที่สำคัญของ PCI • ใช้เทคนิคที่ใช้แอ็ดเดรสบัส/ดาต้าบัสเป็นแบบ multiplexed ทำให้ลดขนาดจำนวนขาของสล็อต PCI • ใช้ระบบ Plug&Play ทำให้สามารถติดตั้งอุปกรณ์ได้โดยไม่ต้องตั้งค่าคอนฟิกกุเรชัน ทำให้ลดปัญหาการเกิดอินเทอร์รัพท์ • มีระบบ Write Posting และ Read Perfecting ทำให้ประหยัดเวลาในการเตรียมการเขียน และอ่านข้อมูล • เป็นระบบบัสที่ไม่ขึ้นกับโปรเซสเซอร์ ทำให้สามารถใช้อุปกรณ์ร่วมกันได้ เป็นการลดค่าใช้จ่าย และการซ่อมบำรุง สำหรับการเชื่อมต่ออุปกรณ์กับบัสแบบ PCI • มีการตรวจสอบ และแก้ไขข้อผิดพลาดในระหว่างการถ่ายโอนข้อมูล
มาตรฐานของบัส SCSI SCSI (Small Computer System Interface) เป็นบัสแบบขนานที่ออกแบบมาเพื่อทำงานเป็นสากลกับไอโอดีไวซ์ บัสแบบ SCSI มีการกำหนดแอ็ดเดรสให้แต่ละดีไวซ์ ถูกออกแบบให้เป็น “daisy chained” ที่แต่ละดีไวซ์จะเชื่อมต่อกับดีไวซ์ โดยตัวที่สองจะเชื่อมต่อกับตัวที่หนึ่ง ตัวที่สามจะเชื่อมต่อกับตัวที่สอง เป็นเช่นนี้เรื่อยไป
มาตรฐานของบัส AGP AGP (Accelerated Graphics Port) เป็นบัสที่ใช้กับการ์ดจอเท่านั้น เพื่อการแสดงผลภาคเคลื่อนไหวแบบ 3 มิติ รวมทั้งภาพยนตร์ หรือวิดีโอแบบจอคอมพิวเตอร์ โหมด x1 สามารถถ่ายโอนข้อมูลที่เป็นความเร็ว 266 เมกะไบต์ต่อวินาที โหมด x2 สามารถถ่ายโอนข้อมูลที่เป็นความเร็ว 532 เมกะไบต์ต่อวินาที ปัจจุบัน โหมด x4 สามารถถ่ายโอนข้อมูลที่เป็นความเร็ว 1,064 เมกะไบต์ต่อวินาที
มาตรฐานของบัส USB USB (Universal Serial BUS) เป็นมาตรฐานในการอินเตอร์เฟซกับคอมพิวเตอร์ด้วยอัตราการถ่ายโอนข้อมูลสูงกว่า 1 เมกะไบต์ต่อวินาที และสามารถช่วยลดข้อจำกัดจำนวนดีไวซ์ที่ที่เชื่อมต่อกับเมนบอร์ดจองระบบ เพื่อขยายขีดความสามารถในการทำงานของพอร์ดอนุกรม พอร์ต USB เป็นพอร์ตที่ทันสมัย เนื่องจากสามารถรองรับอุปกรณ์ได้หลากหลาย และเชื่อมต่อได้ง่าย
มาตรฐานของบัส ข้อดีของ USB • สามารถเชื่อมต่อดีไวซ์ได้มากขึ้น โดยสามารถเชื่อมต่อได้ถึง 127 ดีไวซ์ใน คอมพิวเตอร์เครื่องเดียว • ความเร็วในการถ่ายโอนข้อมูลสูงสุดถึง 480 เมกะบิตต่อวินาที หรือ 60 เมกะไบต์ ต่อวินาที (ใน USB 2.0) ทั้งสัญญาณเสียง และสัญญาณภาพ • ลดการใช้รีซอร์ส IRQ และสล็อต (Slot) สำหรับการ์ดต่าง ๆ ที่เป็นอุปกรณ์ต่อ พ่วงในคอมพิวเตอร์ได้อย่างมาก • สนับสนุนการทำงานแบบ Plug&Play โดยเป็นการขยายความสามารถ ฟีเจอร์นี้ ทำให้นำมาใช้งานกับอุปกรณ์ภายนอกที่สนับสนุนฟีเจอร์นี้ได้
มาตรฐานของบัส ส่วนประกอบของ USB ทั้งส่วนที่เป็นฮาร์ดแวร์ และซอฟต์แวร์ • ฮาร์ดแวร์ - USB Controller/Root Hub เป็นฮาร์ดแวร์ที่ติดอยู่บนเมนบอร์ด ทำหน้าที่ควบคุมการถ่ายโอนข้อมูลบนบัสแบบ USB โดยมี Root Hub เป็นจุดเชื่อมต่อที่อยู่บนเมนบอร์ด เช่นกัน - USB Hubs เป็นฮับแบบหนึ่งทำหน้าที่ขยายการเชื่อมต่อเพื่อติดตั้งดีไวซ์ USB ได้มากขึ้น เช่น คีย์บอร์ด เครื่องพิมพ์ เป็นต้น โดยมีส่วนประกอบหลัก 2 ส่วนคือ Hub Controller และ Hub Repeater - อุปกรณ์ USB เป็นอุปกรณ์ที่ออกแบบมาเพื่อใช้งานกับ USB โดยมีหัวต่อของอุปกรณ์
รูปแบบการเชื่อมต่อของUSBรูปแบบการเชื่อมต่อของUSB
มาตรฐานของบัส ส่วนประกอบของ USB ทั้งส่วนที่เป็นฮาร์ดแวร์ และซอฟต์แวร์ • ซอฟต์แวร์ - USB Device Driver - USB Driver - Host Controller Driver
มาตรฐานของบัส FireWire FireWire ถูกออกแบบขึ้นมาเพื่อรองรับการถ่ายโอนข้อมูลความเร็วสูง พัฒนาการล่าสุดของ FireWire จะมีอัตราการถ่ายโอนข้อมูลอยู่ที่ 3.2 กิกะบิตต่อวินาที ทำให้เหมาะสมในการถ่ายโอนข้อมูลประเภทภาพเคลื่อนไหวและเสียง การประชุมทางไกลที่เรียกว่า “วิดีโอคอนเฟอร์เรนต์” (Video conference) และใช้กับแอปพลิเคชันที่ต้องการความเร็วในการถ่ายโอนข้อมูลสูง
การเชื่อมต่อดีไวซ์เข้ากับ FireWire
มาตรฐานของบัส FireWire คุณสมบัติที่เหมือนกันของ FireWire และ USB บัสที่มีสัญญาณไฟฟ้า Plug & Play และปรับแต่งคอนฟิกกุเรชันตัวเอง ใช้ได้กับดีไวซ์ที่หลากหลาย สนับสนุนการทำงานบนเลเยอร์ 4 เลเยอร์ล่างของโมเดล ISO Layer วงรอบบัส หรือเวลาต่อเฟรมที่คงที่ การถ่ายโอนข้อมูลทั้งแบบอะซิงโครนัส และไอโซโครนัส
มาตรฐานของบัส FireWire คุณสมบัติที่ต่างกันระหว่าง FireWire และ USB คุณสมบัติเฉพาะของ USB: USB ถูกออกแบบให้มีราคาต่ำ มีความเร็วต่ำ เพื่อใช้งานกับดีไวซ์ที่อินเทอร์เฟซความเร็วต่ำ การทำงานของ USB ขึ้นอยู่กับ Host controller คุณสมบัติเฉพาะของ FireWire: FireWire ถูกออกแบบให้เป็นบัสที่ทำงานด้วยความเร็วสูงสำหรับการอินเทอร์เฟซกับดีไวซ์จำพวกกล้องถ่ายวิดีโอและดิสก์ไดร์ฟ ซึ่งถูกออกแบบให้สามารถปรับแต่งคอนฟิกกุเรชันตัวเองได้โดยไม่ต้องให้ Host controller
มาตรฐานของบัส FireWire คุณสมบัติที่ต่างกันระหว่าง FireWire และ USB การรวมแพ็กเก็ต และการถ่ายโอนข้อมูลของ USB: การทำงานของ USB ขึ้นอยู่กับ Host controller ที่จะจัดการทุกอย่าง การรวมแพ็กเก็ต และการถ่ายโอนข้อมูลของ FireWire: เริ่มทำงานจะมีดีไวซ์หนึ่งถูกเลือกให้เป็น Host หรือ Bus controller ซึ่ง Controller ที่กำหนดนั้นจะเก็บโครงสร้างข้อมูลที่ประกอบด้วยข่าวสารเกี่ยวกับบัส
มาตรฐานของบัส การเปรียบเทียบ USB กับ FireWire ในคุณสมบัติหลัก