Download
1 / 1
10 likes | 130 Vues
Learning Intrinsic Shape Classes. Bayesian approach. determine location, scale, orientation. Estimating Extrinsic Parameters. Original image. Foreground blobs. Blob orientation axes in a frame. determine body shape. Blob orientation axes of a sequence. Inliers found by RANSAC.

E N D
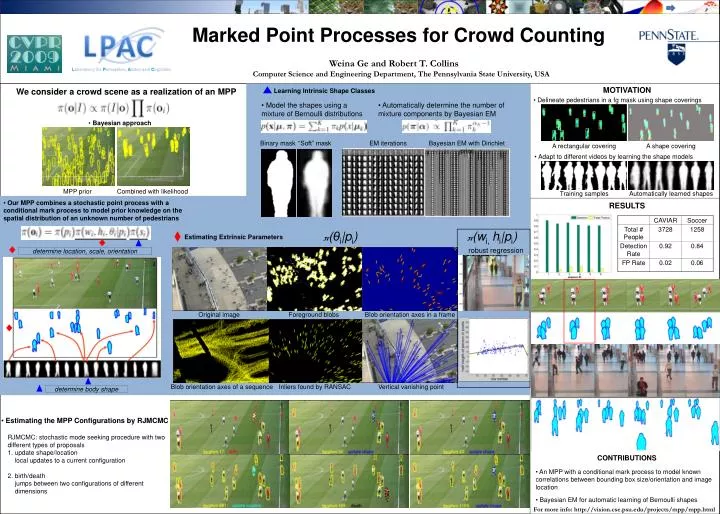
Learning Intrinsic Shape Classes • Bayesian approach determine location, scale, orientation Estimating Extrinsic Parameters Original image Foreground blobs Blob orientation axes in a frame determine body shape Blob orientation axes of a sequence Inliers found by RANSAC Vertical vanishing point Binary mask “Soft” mask A rectangular covering A shape covering MPP prior Combined with likelihood Marked Point Processes for Crowd Counting Weina Ge and Robert T. CollinsComputer Science and Engineering Department, The Pennsylvania State University, USA MOTIVATION We consider a crowd scene as a realization of an MPP • Delineate pedestrians in a fg mask using shape coverings • Model the shapes using a mixture of Bernoulli distributions • Automatically determine the number of mixture components by Bayesian EM EM iterations Bayesian EM with Dirichlet prior • Adapt to different videos by learning the shape models Training samples Automatically learned shapes • Our MPP combines a stochastic point process with a conditional mark process to model prior knowledge on the spatial distribution of an unknown number of pedestrians RESULTS π(θi|pi) π(wi, hi|pi) robust regression • Estimating the MPP Configurations by RJMCMC RJMCMC: stochastic mode seeking procedure with two different types of proposals 1. update shape/location local updates to a current configuration 2. birth/death jumps between two configurations of different dimensions • CONTRIBUTIONS • An MPP with a conditional mark process to model known correlations between bounding box size/orientation and image location • Bayesian EM for automatic learning of Bernoulli shapes For more info: http://vision.cse.psu.edu/projects/mpp/mpp.html