Download
1 / 10
100 likes | 107 Vues
B.E.E.P. Basic Earth Exploration Probe. International class. Siberian State Aerospace University Krasnoyarsk Russia. Team. Ivan Makarov Project manager Central controller hardware and basic software design;. Egor Krylov Parachute design and manufacturing;

E N D
B.E.E.P.Basic Earth Exploration Probe International class Siberian State Aerospace University Krasnoyarsk Russia
Team • Ivan Makarov • Project manager • Central controller hardware and basic software design; • Egor Krylov • Parachute design and manufacturing; • Structure design and manufacturing; • Main assembly; • Flight tests. • Nikita Boev • Actuators controllers design; • Camera interaction software; • RF design, high gain antenna manufactoring; • Ground control unit assembly; • Flight tests. • Oleg Skiba • Graphic user interface for ground control unit (GCU); • Mapping software assembly.
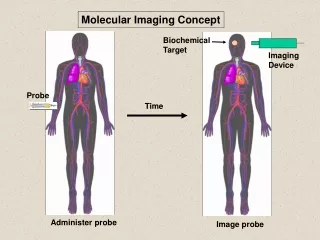
B.E.E.P. missions • Primary: Temperature and pressure measurements; • Specific: Photography and transmission them with realtime error correction; • Comeback mission.
Central controller system • MEMS IMU • Absolute barometer for altimeter • GPS receiver • High computational performance • 5 external serial ports, ethernet port Features
Mission algorithm Actions after release: • Waiting for parachute opening. When barometric altitude is lower than it’s maximum for 10 meters; • Starts telemetry recording and photography; • Starts data transmitting process; • Waits 2 seconds for flight stabilization; • Checks GPS signal reacquiring; • Stars return mission control; • Stops control, telemetry and photographs recording after 10 seconds of constant barometric altitude. • Keeps transmitting gained data till the last written file.