Download
1 / 51
510 likes | 630 Vues
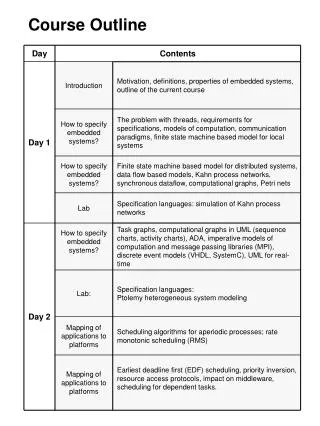
Course Outline (Tentative). Fundamental Concepts of Signals and Systems Signals Systems Linear Time-Invariant (LTI) Systems Convolution integral and sum Properties of LTI Systems … Fourier Series Response to complex exponentials Harmonically related complex exponentials …

E N D
Course Outline (Tentative) • Fundamental Concepts of Signals and Systems • Signals • Systems • Linear Time-Invariant (LTI) Systems • Convolution integral and sum • Properties of LTI Systems … • Fourier Series • Response to complex exponentials • Harmonically related complex exponentials … • Fourier Integral • Fourier Transform & Properties … • Modulation (An application example) • Discrete-Time Frequency Domain Methods • DT Fourier Series • DT Fourier Transform • Sampling Theorem • Laplace Transform • Z Transform
... -1 -4 2 3 ... 1 -3 -2 0 4 Linear Time-Invariant Systems • Important class of systems as many physical phenomena can be modeledas such Representation of DT Signals in Terms of Pulses • DT unit impulse can be used to construct any DT signal • Think of a DT signal as a sequence of individual impulses • Consider x[n]
x[-2]δ[n+2] x[-1]δ[n+1] x[0]δ[n] -1 -2 0 x[1]δ[n-1] 0 1 2 0 1 x[2]δ[n-2] Linear Time-Invariant Systems x[n] is actually a sequence of time-shifted and scaled impulses
Linear Time-Invariant Systems • It is possible to re-generate an arbitrary signal by sampling it with shifted unit impulse: • This is called as sifting property: x[n] = - - - + x[-4] δ[n+4] + x[-3] δ[n+3] + x[-2] δ[n+2] + + x[-1] δ[n+1] + x[0] δ[n] + x[1] δ[n-1] + - - - shifted impulse weights Sifting property of DT impulse
DT Unit Impulse Response • x[n] is superposition of scaled & shifted impulses • The output of a linear system to x[n] = • superposition of the scaled responses of the system to each of these shifted impulses • Let hk[n] be the response of a linear system to δ[n-k]. • From superposition property of linear systems, the response y[n] is the sum of individual responses, i.e.,
Unit Impulse Response DT Unit Impulse Response • In general, if the system is also time-invariant, then hk[n], response to δ[n-k], is a time-shifted version of h0[n], which is the response of the system to δ[n]; • So, for k=0, i.e., input is δ[n], then the response of the system is h[n] is the output (response) of the LTI system when δ[n] (impulse) is the input
Convolution Sum Superposition Sum Convolution Sum Representation of LTI Systems Recall that for an LTI system (due to superposition property): Hence, for an LTI system, the output y[n] for the input x[n] is convolution of the sequences (signals) x[n] and h[n], and represented by:
2 h[n] x[n] 1 0.5 n 0 1 0 1 2 2.5 2.5 2 h[n-1] 2 y[n] 0.5 0.5 h[n] 0.5 0 1 1 2 1 2 2 3 0 3 Convolution SumExample Example:Consider an LTI system with impulse response h[n] and input x[n] is applied to the system. Find the output y[n]. +
2 x[n] h[n] 0.5 1 n 0 1 0 1 2 Convolution SumExample • Example: Consider LTI system with h[n] y[n]= x[k] h[n-k] Consider h[n-k] as a time-reversed and shifted version of h[k] If we plot h[-k] then we can obtain h[n-k] simply by shifting to right (by n) if n>0, or to left if n<0
2 x[k] 0.5 k 1 0 1 k n-2 n-1 n 0 k -2 -1 0 k -1 0 1 2.5 2.5 k 2 y[n] 0.5 0 1 2 k 1 2 0 3 1 2 3 0 k n-2 n-1 n 0 Convolution SumExample • Flip h[k] • By shifting h[k] for all possible values of n, pass it through x[n]. h[n-k] , n<0 h[0-k] h[1-k] h[2-k] h[3-k] y[n]=0 h[n-k] , n>3
y[n]= x[k] h[n-k] 1 x[k]= u[k] h[-k] k - - - 0 1 2 k 0 Convolution SumExample Ex:Consider x[n]= u[n] for 0< <1 and h[n]=u[n]. Find y[n].
h[n-k] - - - 1 k x[k]= u[k] 0 1 n k 0 1 2 for n≥0 x[k]h[n-k]≠0 for 0≤k≤n Convolution SumExample for n≥0 for n<0 x[k]h[n-k]=0 for k
Convolution SumExample x[k]h[n-k] =
1 1 x[k]=2k u[-k] h[n-k] - - - - - - k k 0 0 n -4 -3 -2 -1 y[n] = x[k]h[n-k] = 2k = = = 2 Convolution SumExample Ex: Consider an LTI system with input x[n]=2n u[-n] and h[n]=u[n]. Find y[n]. for n≥0, x[k]h[n-k] has nonzero samples for k≤0
y[n] = x[k]h[n-k] = 2k = 2 1 y[n] - - - - - - 0 1 2 -5 -4 -3 -2 -1 Convolution SumExample for n<0, x[k]h[n-k] has nonzero samples for k≤n
x(t) δΔ(t) - - - t -Δ Δ 2Δ kΔ t 0 Δ 0 Representation of CT Signals in terms of Impulses Consider a pulse or “staircase” approximation, , to a CT signal x(t) Similar to DT case, can be expressed as a linear combination of delayed pulses Define
As Δ 0, approaches to x(t) (sifting property) Representation of CT Signals in Terms of Impulses Since has unit amplitude, we can represent in terms of shifted and scaled rectangular pulses…
Integrate both sides over t : 1 Representation of CT Signals in Terms of Impulses Other derivations for this ?? Recall:
As approaches to y(t) y(t) = lim CT Unit Impulse Response & Convolution Integral Let us define as the response of a linear system to (note as hence ) Hence,
Convolution integral CT Unit Impulse Response & Convolution Integral By time-invariance and therefore, impulse response! An LTI system is completely characterized by its impulse response (i.e., h[n] in DT, h(t) in CT)
1 1 0 0 Convolution IntegralExample Let , a>0 be the input to an LTI system with h(t) = u(t). Find y(t)!
y(t)=0 For t<0, t>0 Convolution IntegralExample for t<0 t 0 0 for t>0 t 0
Convolution IntegralExample for t>0
Properties of Convolution and LTI Systems 1) Commutative Property: Convolution is a commutative operation in both DT and CT. Easily shown by substituting variables Practical use ?? (take h[k], time-reverse and shift x[k] whenever it’s easier)
h1 x y x y h1+h2 h2 + Properties of Convolution and LTI Systems 2) Distributive Property: Convolution distributes over addition. Practical interpretation ?? (parallel interconnection of systems)
Properties of Convolution and LTI Systems Practical ?? - (response to sum of two inputs = sum of responses to inputs individually) - Break a complicated convolution into several simpler ones (useful !!)
x[n] h1[n] h2[n] y[n] y[n] Result 2 Result 1 h1[n]*h2[n] x[n] y[n] h2[n]*h1[n] x[n] x[n] h2[n] h1[n] y[n] Properties of Convolution and LTI Systems 3) Associative Property: : (x[n]* h1[n])* h2[n] by associativity by commutativity
memoryless Properties of Convolution and LTI Systems Results: • Impulse response of cascade LTI systems is the convolution of their individual impulse responses • Overall system response is independent of the order of the systems in cascade ! 4) LTI Systems with & w/o Memory: If then the LTI system is memoryless ! (look at the convolution sum ) • Hence,
y(t) x(t) h(t) h1(t) w(t)=x(t) Identity System δ(t) x(t) x(t) if the system is invertible then Properties of Convolution and LTI Systems 5) Invertibility of LTI Systems and is the impulse response of the LTI inverse system.
Properties of Convolution and LTI SystemsExample Consider LTI system of time-shift: y(t)=x(t-t0) Impulse response of the system is h(t)=δ(t-t0) Convolution of a signal with a shifted impulse shifts the signal Inverse: shift the output back!
accumulator Properties of Convolution and LTI SystemsExample Consider an LTI system with h[n]=u[n] ; as u[n-k] = 0 for n-k<0 y[n]=x[n]-x[n-1] (1st difference) h1[n] = δ[n]-δ[n-1] LTI inverse: Check if really inverse: h[n]*h1[n] = u[n]*(δ[n]-δ[n-1]) = u[n]*δ[n]-u[n]*δ[n-1] = u[n]-u[n-1] = δ[n]
Properties of Convolution and LTI Systems 6) Causality for LTI Systems: ; the output y[n] must not depend on x[k] for k>n h[n-k] should be zero for k>n h[n]=0 for n<0 h(t)=0 for t<0 Practical intuition ?? (impulse response must be zero before theimpulse occurs: initial rest) For causal LTI systems, convolution sum becomes:
Properties of Convolution and LTI Systems • In CT: h(t)=0 for t<0 causal; convolution integral becomes: REMARK: Causal Signal ! (zero for n<0, t<0)
Properties of Convolution and LTI Systems 7) Stability for LTI Systems: Consider <B if the impulse response is absolutely summable then the system is stable!
Properties of Convolution and LTI Systems • In CT: if the impulse response is absolutely integrable then the system is stable! Example: Shift h(t)=δ(t-t0) stable! Accumulator: h[n]=u[n] unstable!
Unit Step Response Another signal used quite often to describe the behaviour of LTI systems corresponds to the output when x[n]=u[n] or x(t)=u(t) : the step response of a DT LTI system is the running sum of its impulse response In continuous-time:
Unit Step Response : the step response of a CT LTI system is the running integral of its impulse response The impulse response is the first derivative of the unit step response
Causal LTI Systems Described by Differential and Difference Equations • CT systems for which the input and output arerelated through a linearconstant-coefficientdifferential equation, • e.g., RC circuit • DT systems for which the input and outputarerelated through a linear constant-coefficient difference equation, • e.g., bank account
Linear Constant-Coefficient Differential Equations Consider Implicit representation of input-output relationship • Completesolution has twoparts: • - particular solution, yp(t) • - homogeneous solution, yh(t) • yh(t) is the solution to x(t)=0, i.e., • yp(t) depends on x(t)
Linear Constant-Coefficient Differential Equations For x(t)=Ke3tu(t) yp(t)=Ye3tfor t>0 Substitute yp(t) and try yp(t) = , t>0 yh(t)=Aest Asest+2Aest=0 s=-2 yh(t)=Ae-2t y(t)= , t>0
Linear Constant-Coefficient Differential Equations Weneed initial conditions. For causal LTI systems, we assume initial rest, y(0)=0 substitute:
Linear Constant-Coefficient Differential Equations In general, Nth order linear constant-coefficient differential equation is has particular solution + homogeneous solution initial (auxiliary) conditions are necessary. for causal LTI systems, initial rest:
Linear Constant-Coefficient Differential Equations Assume an LTI system described by Nth order linear constant-coefficient differential equation as follows In this case, we find that h(t) (impulse response) satisfies with the initial (auxiliary) conditions (recall that for causal LTI systems, initial rest): Check Auxiliary text 2 (Yuksel) for proof.
Linear Constant-Coefficient Differential Equations Example: Consider the LTI system described by Let us find the impulse response first. h(t) satisfies The characteristic equation is: Satisfied for s=-3, and s=-4 When the initial conditions are used, the coefficients are determined as You can then obtain the output by using convolution
Linear Constant-Coefficient Difference Equations • Recursive operation as the output at time n is a function of previous values of input and output. • We need initial conditions: y[-1], ..., y[-N] In DT: Rearrange it, then:
Linear Constant-Coefficient Difference Equations As a special case, N=0, then (non-recursive (LTI system), No need for initial conditions) Its impulse response: This is a finite duration impulse response. Such systems are called finite impulse response (FIR) systems.
Linear Constant-Coefficient Difference Equations Example: Consider the difference equation recursive; initial conditions are needed Assume and initial rest, i.e., x[n]=0, y[n]=0 for n≤-1: ForN≥1: Infinite Impulse Response (IIR) for K=1,
b x[n] y[n] + D y[n-1] -a Block Diagram Representations • Used to help in understanding and implementation of systems • DT Case: • First-order difference equation y[n]+ay[n-1]=bx[n] (addition, multiplication, delay) x2[n] x1[n] x1[n]+ x2[n] a x[n] ax[n] x[n] x[n-1] D + y[n]=-ay[n-1]+bx[n]:
Block Diagram Representations CT Case: First-order differential equation b/a x(t) y(t) + D -1/a