Download
1 / 14
140 likes | 286 Vues
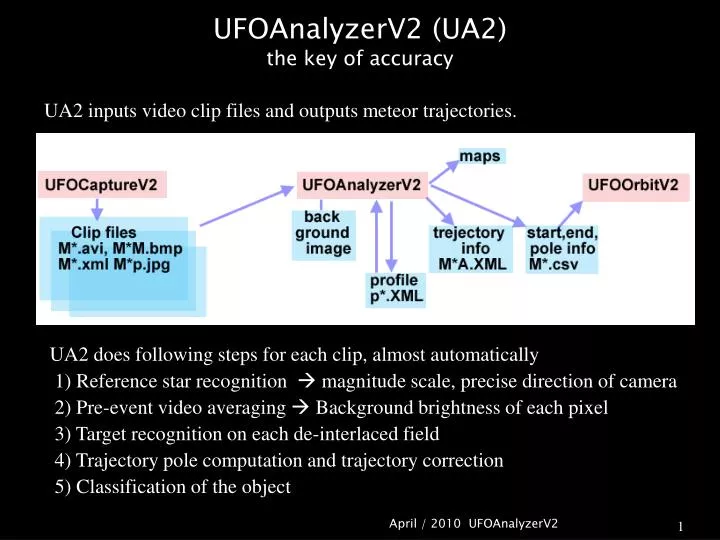
UFOAnalyzerV2 (UA2) the key of accuracy. UA2 inputs video clip files and outputs meteor trajectories. UA2 does following steps for each clip, almost automatically 1) Reference star recognition magnitude scale, precise direction of camera

E N D
UFOAnalyzerV2 (UA2)the key of accuracy UA2 inputs video clip files and outputs meteor trajectories. UA2 does following steps for each clip, almost automatically 1) Reference star recognition magnitude scale, precise direction of camera 2) Pre-event video averaging Background brightness of each pixel 3) Target recognition on each de-interlaced field 4) Trajectory pole computation and trajectory correction 5) Classification of the object April / 2010 UFOAnalyzerV2
Other UA2 functions - Profile making : FOV plate adjustment with parameter optimizer - Clip file management : view (movie, frame, field), delete, move/copy - Plot : Trail map, Ground map - Utilities : time adjust, video file trimming… Note: Upward compatibility of analysis has been kept since 2004. Anyone can get better result by re-analysis using latest versions. My treasure! Complete 6 years Records of Tokyo1 April / 2010 UFOAnalyzerV2
How UA2 processes video images De-interlace analysis Background subtraction FOV plate constants Center of a object, Light-sum CCD spectral sensitivity compensation Magnitude Trajectory plane computation April / 2010 UFOAnalyzerV2
De-interlace Analysis UA2 does de-interlace analysis. NTSC or PAL video signal contains two images taken in a different timing. It should be analyzed individually. Merit of de-interlaced analysis. Doubles time resolution (samples) -- accuracy increased especially for short meteors (major of obs.). Shape of luminescence becomes simple -- accuracy of center position increased. Note : De-interlace analysis does not reduce the vertical resolution directly. The effect is complex depend on the size and speed of the object. an interlaced frame de-interlaced two fields (deleted lines are interpolated, for display) April / 2010 UFOAnalyzerV2
Background subtraction UA2 does background brightness subtraction on each pixel, using the average brightness of adjacent video frames . ( UFOCaptureV2 records video before the event at least 10 frames. ) The incremental brightness is used for center determination and light-sum computation. April / 2010 UFOAnalyzerV2
FOV plate constants( compensation of lens distortion ) UA2 uses 4th polynomial equation for the compensation of lens distortion. R = k4*r^4 + k3*r^3 + k2*r^2 + (1.0 – k4 – k3 –k2)*r Where • R is corrected distance from optical center on aspect ratio corrected plane. • r is catalog based computed distance from optical center. • R, r is normalized as 1.0 at the horizontal edge The parameter optimizer decides k2,k3,k4, FOV size, optical center offset, pixel aspect ratio, az, ev, rotat once. April / 2010 UFOAnalyzerV2
Typical position determination accuracy = 0.3 pixel, for most of the lenses April / 2010 UFOAnalyzerV2
Comparison with exponential equation April / 2010 UFOAnalyzerV2
Center of the object, Light-sum Procedure for moving object • Sets a minimum rectangle that covers the Hit (brightness changed) pixels. • Compute the weighted center position of incremental brightness, using background image. • Sum of the incremental brightness becomes Light-sum of the object Procedure for stars • Compute the background level as average brightness of donut field between R and 1.5R (default R=5 pixel). • Compute the weighted center of incremental brightness above the level. • Sum of the incremental brightness becomes Light-sum of the star. April / 2010 UFOAnalyzerV2
CCD spectral sensitivity compensation(Cataloged magnitude compensation for the CCD) To avoid the influence of the color of ref stars in FOV, UA2 converts each star’s cataloged visual magnitude (Mv) to color waited magnitude (Mc) according to the CCD spectral sensitivity. Mc = Mv + Bvf * (B-V) Typical error of star magnitude : 0.5 Mag Bvf = -1.0 , (2V-B) Bvf = 0.0 (V mag) Bvf = 1.0 (B mag) Mc 0 Bvf = 0.28 (WAT-N100) 0 Light-sum of star The best value WAT-100N : 0.28 WAT-902H2U : 0.30 April / 2010 UFOAnalyzerV2
Magnitude For all clips that contains more than 5 stars, p, q are decided by least square method. Mc = p*log( L ) + q : L is the Light-sum of the stars p becomes -2.5 naturally. ( as is the theoretical value). The object’s magnitude is computed by this p, q, and its Light-sum. ( Note: The color of the object itself is not is not compensated. It can be done by spectral camera only. ) April / 2010 UFOAnalyzerV2
Trajectory plane determination UA2 determinates trajectory plane by least square pole determination Note: Begin and End vector should be modified to be precisely on this plane. Pole determination by least square method (pole vector can be got by solving this 3 variable 3 simultaneous equations ) April / 2010 UFOAnalyzerV2
Remaining Problems Correct center determination for meteor with irregular shape. Big fire balls that cause white out of FOV Breakup bodies / afterglow / asymmetrical shape Some part of luminescence covered by clouds or edge of FOV Dashed trajectory by clouds Magnitude measurement without ref stars Where is the body ? How ? April / 2010 UFOAnalyzerV2
Summary / Comment Current UFOAnalyzerV2 uses many new method to achieve the automated hi-accuracy measurement. But still is having many problems. There is possibility that future version will do better for past records. The largest error cause in current video observations is the determination of the center of the object. 0.3 pixel is current limit ( It causes up to a few degrees of pole direction error for short meteors even using 60 degrees FOV lens. From this point, all sky lens never be recommended ). Velocity measurement is specially difficult, differential operation is very sensitive to errors and meteor often has unusual shapes such as tail, afterglow, or explosions. These errors can be compensate by statistical method of post processing. If the measurement of angular velocity becomes precise enough, the radiant estimation from single observation will be possible. April / 2010 UFOAnalyzerV2