Download
1 / 43
540 likes | 2.78k Vues
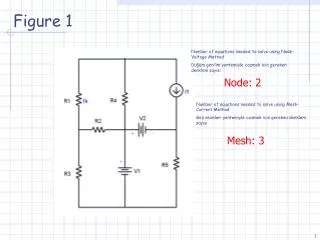
LİNEER DENKLEM TAKIMLARININ ÇÖZÜM YÖNTEMLERİ. Analitik yöntemler İteratif Yöntemler. Analitik Yöntemler. Crammer Gauss eliminasyon yöntemi Gauss-Jordan Yöntemi Thomas yöntemi LU Ayrıştırma yöntemleri Ters Matris Yöntemi. Thomas yöntemi.

E N D
LİNEER DENKLEM TAKIMLARININ ÇÖZÜM YÖNTEMLERİ Analitik yöntemler İteratif Yöntemler
Analitik Yöntemler • Crammer • Gauss eliminasyon yöntemi • Gauss-Jordan Yöntemi • Thomas yöntemi • LU Ayrıştırma yöntemleri • Ters Matris Yöntemi
Thomas yöntemi • Hesaplamalı akışkanlar dinamiğinde ve Hesaplamalı mühendisliğin bazı problemlerinde zaman zaman üç diyagonallikatsayılar matrisine sahip lineer denklem takımlarıyla karşılaşılır. • Üç diyagonallikatsayılar matrisine sahip böyle bir lineer denklem takımı matris biçiminde normal olarak aşağıdaki gibi gösterilebilir
Thomas yöntemi • Ancak katsayılar matrisinin çoğu sıfır olan elemanları için bilgisayar hafızasında gereksiz yer işgal etmemek ve gereksiz işlemlerden kaçınmak amacıyla (N×N) boyutlarında bir katsayılar matrisi yerine (N×3) boyutlarında bir katsayılar matrisi kullanacak biçimde bir düzenleme ve buna uygun bir çözüm algoritması kullanılması tercih edilir. • Çözüm için çok tercih edilen bir yöntem Thomas algoritmasıdır. Thomas algoritması aslında Gauss eliminasyon yönteminin üç kolonlu bir dikdörtgenselmatris kullanılarak yapılan özel bir uygulamasıdır.
Thomas yöntemi • Yani yukarıdaki denklem sistemi Gauss Eliminasyon Yöntemi ile Alt Üçgen Matrise dönüştürülüp tersten süpürme işlemi yapılabilir.
olup, hesapların başlatılabilmesi ve sürdürülebilmesi için ukk ve lkkelemanlarından birinin önceden belirlenmesi gerektiği görülmektedir. Nitekim uygulamada bu elemanlardan birisinin değeri 1 olarak seçilir. Bu seçime bağlı olarak yöntem iki farklı isimle tanınmaktadır:
Doolittle Yöntemi • Doolittle yönteminde alt-üçgensel matrisin diyagonal elemanları 1 alınmakta olup, buna göre yukarıdaki üç adım şekline gelir.
Görüldüğü gibi hesaplamalarda bir sıra izlenerek herbir adımda önce üst-üçgensel matrisin bir satırının elemanlarının daha sonra da alt-üçgensel matrisin bir sütununun elemanlarının bulunması gerekmektedir. • Buna göre Doolittle yöntemi için genel algoritma aşağıdaki şekilde yazılabilir.
Crout Yöntemi • Crout yönteminde üst-üçgensel matrisin diyagonal elemanları 1 alınmakta olup, buna göre yukarıdaki üç adım
Görüldüğü gibi hesaplamalarda yine bir sıra izlenerek bu defa her bir adımda önce alt-üçgenselmatrisin bir sütununun elemanlarının daha sonra da üst-üçgensel matrisin bir satırının elemanlarının bulunması gerekmektedir. • Buna göre Crout yöntemi için genel algoritma aşağıdaki şekilde yazılabilir.
LU Ayrıştırmasıİleri süpürme aşaması • L⋅ Y=B denkleminin Y için çözümü ilk elemandan başlayarak ileri-süpürme yoluyla gerçekleştirilir.
L matrisinin birinci satırı ile Y vektörünün çarpımından • L matrisinin i 'inci satırının Y vektörü ile çarpımından
LU AyrıştırmasıGeri süpürme aşaması • U⋅ X=Y denkleminin X için çözümü de son elemandan başlayarak geri-süpürme yoluyla gerçekleştirilir.
U matrisinin sonuncu satırı X vektörüyle çarpılarak • U matrisinin i 'inci satırı X vektörüyle çarpılarak elde edilir.
İteratif Yöntemler • Gauss-Jakobi yöntemi • Gauss-Sidel yöntemi • Rölaksasyon Yöntemi
İteratif Yöntemler • A x=b doğrusal denklem sistemi, n çok büyük ise ve A çok seyrek ise iterasyon yöntemleri ile çözülür. • Çünkü direkt metodlar çok fazla bellek, dört işlem ve hesap süresi gerektirirler. • Biriken yuvarlama hataları çözümü tehlikeye sokar. İterasyon yöntemlerinde A nın elemanları değişmez, bu nedenle A nın sadece sıfırdan farklı elemanları depolanır, sıfır ile dört işlem yapılmaz. • Hem bellek hem hesap süresi hem de yuvarlama hataları önemli miktarda azalır. Uygulamada karşılaşılan A matrisi genelde çok seyrektir, sıfırdan farklı eleman oranı yaklaşık %1-5 civarındadır.
Çözüm • Başlangıç için x1=x2=x3=x4=0 alalım
n bilinmeyenli denklem sistemi için Gauss-iedelformülü; • Yakınsama koşulu • GAUSS-SEIDEL metodu ile JACOBI metodu temelde aynıdır. Tek fark şudur: GAUSS-SEIDEL metodunda xinin her yeni değeri hemen kullanılır.
a11 x1+a12 x2+a13 x3=b1 a21 x1+a22 x2+ a23 x3=b2 a31 x1+a32 x2+ a33 x3=b3 • 3’e 3’lük bir denklem sistemini örnek olarak alalım. Başlangıç koşulları: x1=0; x2=0; x3=0
Örnek: Gauss-Siedel yöntemini kullanarak aşağıdaki sistemin çözümünü bulun. • 3 x1-0.1 x2-0.2 x3 =7.85 • 0.1 x1+7 x2- 0.3 x3=-19.3 • 0.3 x1+0.2x2+10 x3=71.4 Çözüm: Önce bilinmeyenleri diğerleri cinsinden bulalım. Burada başlangıç değer olarak “0” alırsak
Örnek: Gauss-Siedel yöntemini kullanarak aşağıdaki sistemin çözümünü bulun. ε=0.0001 seçelim.
Çözüm • Başlangıç için x1=x2=x3=x4=0 alalım
!!! Görüldüğü gibi aynı problem • Jacobi yöntemi ile 13 iterasyonda çözülürken • Sidel yöntemi ile 7 iterasyonda çözülebiliyor
Ardarda aşırı gevşetme yöntemi (Successiveover-relaxation-SOR)
büyüklüğü, dikkat edilirse aslında k ’ıncıiterasyon adımında bulunan çözüm vektörünün katsayılar matrisi ile çarpımı olup, tam çözümün elde edilmesi halinde bu büyüklüğün biye eşit olacağı açıktır. Ancak iterasyon sırasında çözümler tam çözümden farklı olacağından bu büyüklük de denklem sisteminin sağ taraf vektöründen farklı olacaktır. Aradaki fark
“kalıntı (residus)” olarak adlandırılır. Buna göre İLK bağıntının sağındaki ikinci terim kalıntı terimi olup, bir önceki iterasyon adımında elde edilmiş çözümlere ilave edilen bir düzeltme terimi gibi yorumlanabilir: