Download
1 / 22
220 likes | 370 Vues
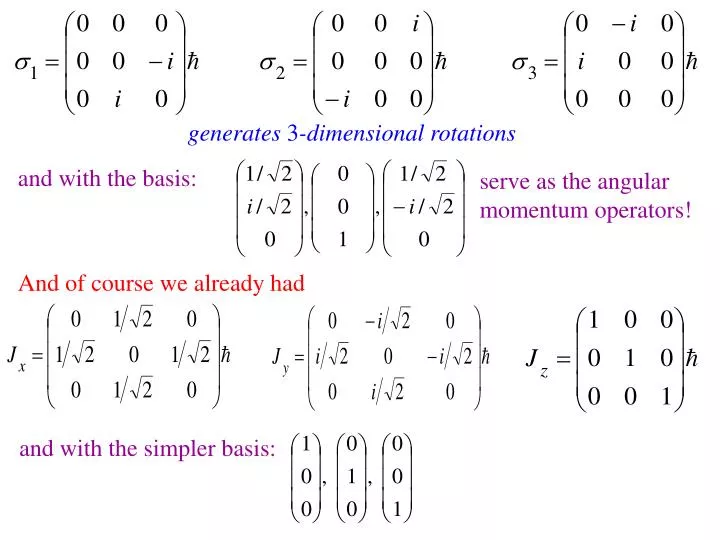
generates 3 -dimensional rotations. and with the basis:. serve as the angular momentum operators!. And of course we already had. and with the simpler basis:. U s 3 U =. †. U s 1 U =. †. U s 2 U =. †. [ 1 2 - 2 1 ] = i 3. U † [ 1 2 - 2 1 ] U = U † i 3 U.

E N D
generates 3-dimensional rotations and with the basis: serve as the angular momentum operators! And of course we already had and with the simpler basis:
Us3U = † Us1U = † Us2U = †
[12 - 21 ] = i3 U†[12 - 21 ]U =U†i3U U†12U- U†21U = iU†3U U†1UU†2U- U†2UU†1U = iU†3U SinceU†U = UU†= I Jx Jx Jy-Jy Jx=iJz
This 6×6 matrix also satisfies the same algebra: a b c x y z 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 0 , 3-dimensional transformations (like rotations) are not limited to 3-dimensional “representations”
Besides the infinite number of similarity transformations that could produce other 3×3 matrix representations of this algebra
R ( ) = e- iJ·/ħ ^ can take many forms The 3-dimensional representation in the orthonormal basis that diagonalizes z is the “DEFINING” representation of vector rotations
ℓ = 2 mℓ= -2, -1, 0, 1, 2 ℓ = 1 mℓ= -1, 0, 1 2 1 0 1 0 L2 = 1(2) = 2 |L| = 2 = 1.4142 L2 = 2(3) = 6 |L| = 6 = 2.4495 Note the always odd number of possible orientations: A “degeneracy” in otherwise identical states!
Spectra of the alkali metals (here Sodium) all show lots of doublets 1924:Paulisuggested electrons posses some new, previously un-recognized & non-classical 2-valued property
Perhaps our working definition of angular momentum was too literal …too classical perhaps the operator relations Such “Commutation Rules” are recognized by mathematicians as the “defining algebra” of a non-abelian (non-commuting) group may be the more fundamental definition [ Group Theory; Matrix Theory ] Reserving L to represent orbital angular momentum, introducing the more generic operator J to represent any or all angular momentum study this as an algebraic group Uhlenbeck & Goudsmitfind actually J=0, ½, 1, 3/2, 2, … are all allowed!
quarks 3 2 1 2 1 2 1 2 1 2 1 2 leptons spin : p, n,e, , , e , , ,u, d, c, s, t, b the fundamental constituents of all matter! spin “up” spin “down” s = ħ = 0.866 ħ ms = ± sz = ħ ( ) 1 0 | n l m > | > = nlm “spinor” ( ) ( ) ( ) the most general state is a linear expansion in this 2-dimensional basis set 1 0 0 1 = + with a 2 + b 2 = 1
obviously: eigenvalues of each are alsoħ/2 but their matrices are not diagonal in this basis How about the operatorssx, sy ? s- s- = 1ħ ħ s- s+ = 1ħ ħ obviously work on the basis we’ve defined
You already know these as the Pauli matrices obeying the same commutation rule: but 2-dimensionally! What if we used THESE as generators?
Should still describe “rotations”. Its 3-components will still require 3 continuously variable independent parameters: x ,y ,z But this is not the defining representation and can not act on 3-dimensional space vectors. These are operators that obviously act on the SPINORS (the SPIN space, not the 3-dimensional wave functions.
Spinors are 2-component objects intermediate between scalars (1-component) and vectors (3-component) When we rotate the “coordinate system” scalars are unchanged. Vector components are mixed by the prescriptions we’ve outlined. What happens to SPINORS? actually can only act on the spinor part
The rotations on 3-dim vector space involved ORTHOGONAL operators Rt=R-1i.e.RtR=RRt= 1 These carry complex elements, cannot be unitary! As we will see later this is a UNITARY MATRIX of determinate = 1 Let’s stay with the simplified case of rotation = z (about the z-axis) ^
and obviously:zzz = z Notice: zz = ( ) ( ) + iz
an operator analog to: ei = cos + isin ( ) ( ) 1 0 0 -1 1 0 0 1 Let’s look at a rotation of2(360o) = -1 + 0 This means A 360o rotation does not bring a spinor “full circle”. Its phase is changed by the rotation.
Limitations of Schrödinger’s Equation 1-particle equation 2-particle equation: mutual interaction
But in many high energy reactions the number of particles is not conserved! np+e++e n+p n+p+3 e-+ p e-+ p + 6 +3g
Let’s expand the DEL operator from 3- to 4-dimensions i.e. lowered since operates on x and as we’ve argued before, the starting point for a relativistic QM equation: then The Klein-Gordon Equation or if you prefer:
But this equation has a drawback: Look at Schrödinger’s Equation for a free particle *( ) ( ) - = 0 The Continuity Equation probability density probability current density
starting from the Klein-Gordon Equation *( ) - ( )*= 0 not positive definite The Klein-Gordon Equation is 2nd order in t! much more complicated time evolution Need to know initial (t=0) state as well as (0)