Download
1 / 29
290 likes | 404 Vues
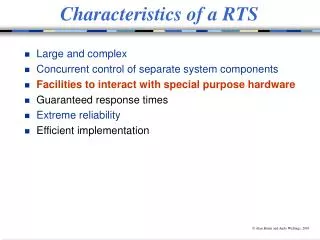
Classification of RTS. RTS Definitions. Precise definition of RTS? Difficult due to the extent and scope of RTS System where a substantial fraction of the design effort goes into making sure that deadlines are met (Krishna/Shin) Response Time is an important parameter:

E N D
Classification of RTS Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS Definitions • Precise definition of RTS? • Difficult due to the extent and scope of RTS • System where a substantial fraction of the design effort goes into making sure that deadlines are met (Krishna/Shin) • Response Time is an important parameter: • The time between the presentation of a set of inputs to a system (stimulus) and the realisation of the required behaviour (response) including the availability of all associated outputs, is called the response time of the system (Laplante) Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS Definitions • Alternative definitions • System that must satisfy explicit (bounded) response-time constraints or risk severe consequences, including failure (Laplante) • System whose logical correctness is based on both the correctness of the outputs and their timeliness (Laplante) • Failed System • A system that cannot satisfy one or more of the requirements stipulated in the formal system specification (Laplante) • Applies only to Hard RTS Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS Definitions • Failed Systems • RTS software rather than hardware usually at fault • Emergence of Software Engineering • Attempts by US DoD (SEI) to improve on the dismal record of software in military systems • Has extended to general software industry • All practical system are RTS? • Time constraints are always bounded? • Need for Classification of RTS • Hard – Firm – Soft • Differ by the consequences of missed deadlines Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS Definitions • A Hard RTS is one in which failure to meet a single deadline may lead to complete and catastrophic system failure (Laplante) • Eg. • Power Plant • Turbine Overspeed Protection • Fuel Shutdown • Flight Controller • ABS (Antilock Braking System) Dr. Hugh Melvin, Dept. of IT, NUI,G
Boiler Turbine R30 BMS VDU 1 Operators Keyboard 1 VDU 2 Binary Field Inputs Binary Outputs Analogue Inputs Analogue Outputs Binary Field Inputs Binary Outputs Analogue Inputs Analogue Outputs Binary Field Inputs Binary Outputs Analogue Inputs Analogue Outputs Operators Keyboard 2 VDU S\E’s Office S\E’s Keyboard 1 VDU Prog. Room Programmers Keyboard AS013 AS131 AS017 AS101 AS133 AS112 HW Analog Inputs Annunciator I/O I/O I/O I/O I/O I/O I/O HW Binary Inputs Printer 1 Tape Drive Storage Unit Printer 2 CPU CPU CPU CPU CPU CPU CPU Printer Prog. Room MEC-RT Data Storage Unit Bus Coupler Bus 1 CS 275 Bus Bus 0 VDU 1 VDU 1 Master Clock CPU 12:45:01 23:01:97 VDU 2 VDU 2 5 1/4”FDD Storage Unit Control Room Control Room VDU 3 VDU 3 I/O VDU 1 Local Terminals CPU CPU CPU VDU 2 Operator’s Keyboard Operator’s Keyboard Alarms Printer Local Printer I/O Fault Log Printer LPA0 I/O I/O MEC-RT Data Storage Unit Annunciator Operator’s Keyboard LPA1 S\E’s VDU & Keyboard Turbine Boiler AS231 Unit Alarms System PG750 Maintenance Computer OS254 Operations Computer VAX Maintenance Management System MEC-RT Data Storage Unit Programmers VDU & Keyboard Programming Room Printer Hard RTS Dr. Hugh Melvin, Dept. of IT, NUI,G Teleperm ME System Overview
CS275 Bus 1 CS275 Bus 1 CS275 Bus 1 CS275 Bus 0 CS275 Bus 0 CS275 Bus 0 Bus A Bus B Bus A Bus B Bus A Bus B Bus Coupler Bus Coupler Bus Coupler U/I U/I U/I U/I U/I U/I Synogate Interface to CS275 Synogate Interface to CS275 Synogate Interface to CS275 Unit 2 Unit 1 Unit 3 Remote Operator Station OIS Server IBM NetFinity 5510 MP001 Gateway R30 Room Station LAN Gateway Communications Room MP002 Control Room Unit 1 Operator Station Control Room Unit 2 Operator Station Control Room Unit 3 Operator Station Dr. Hugh Melvin, Dept. of IT, NUI,G
Bus A Bus B CS275 U/I U/I N8 N8 CPU 3 CPU 1 CPU 2 .. .. .. .. .. .. 2 out of 3 Double Redundant Safety Circuits Non-Redundant Control Circuits Triple Redundant Safety Circuits Burner Management System Dr. Hugh Melvin, Dept. of IT, NUI,G
Hard RTS • Emergence of Fly-by-wire control systems • Military Aircraft • Year Aircraft %Fns supported by S/W 1960 F-4 8 1982 F-16 45 2000 F-22 80 (Source: W.S Humphreys “Winning with S/W, An Exec. Stgy”, Add-Wes. 2002) • Civilian aircraft similar • Also • Robotics • Medical Devices • ABS / Airbag Protection • Most Hard RTS are embedded devices with limited and very specialised software designed for specific hardware Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS Definitions • A Soft RTS is one in which performance is degraded but not destroyed by failure to meet response time constraints (Laplante) • Eg. • Multitasking PC • Internet-based Multimedia • VoIP • Note: For MM data, requirement for logical correctness of output can be relaxed somewhat (See G.1010) Dr. Hugh Melvin, Dept. of IT, NUI,G
Soft RTS: Multimedia ? Dr. Hugh Melvin, Dept. of IT, NUI,G
Soft RTS : VoIP Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS Definitions • A Firm RTS is one in which a few missed deadlines will not lead to total failure, but missing more than a few may lead to complete and catastrophic system failure failure (Laplante) • Difficult to find examples! Dr. Hugh Melvin, Dept. of IT, NUI,G
Firm RTS • Somewhere in the middle • Eg. Private IP Network governed by SLA (Service Level Agreement) • SLA specifies jitter/delay/loss/availability • 99.999% Availability • Lack of adherence results in : • Irate customers loss of business • Penalties imposed on provider • Consumer Devices • Mobile Phone / Cameras etc… • Reservation Systems Dr. Hugh Melvin, Dept. of IT, NUI,G
Sample Time and Response Time • Sample time refers to the rate at which a parameter is monitored • Sample time and Response time are both related to the underlying physical phenomena • Eg. Power System control/protection systems for • Steam Pressure / Turbine Speed / Overvoltage • 3 phenomena have very different natural characteristics • Require very different Sample Times and Response Times to react safely to changing/dangerous conditions • Eg. Flight Control / Car ABS • Sample and Response Times depend on Maximum velocity • 2 aircraft @ 600 mph = relative velocity of 1200 mph • 1760 feet/sec (Min Vertical flight separation = 1000 ft = 0.6 sec) • 2 cars at 120 kph = 66 m/sec .. Response time of msec reqd Dr. Hugh Melvin, Dept. of IT, NUI,G
Sample Time and Response Time • Hard RTS • No point in sampling more frequently than necessary • Wasteful of CPU/Memory • Eg. Steam Pressure versus Voltage • Response time must be guaranteed : Good Average performance is of little use • At 35000 ft when cabin pressure is lost • When a Power station at full output is suddenly disconnected from the National Grid • When ABS is required to work • Soft RTS • Conventional PC OS designed for timesharing and multitasking • Complex timesharing scheduler • Good Average Performance acceptable Dr. Hugh Melvin, Dept. of IT, NUI,G
CPU ASE 6DS1714-8AA Ch 1 0 - 200 bar Ch 2 0 - 3000 rpm Ch 3 spare Ch 4 Voltage Analog Inputs via ADC Modules 2 Wire Transmitter 4 … 20 mA 2 Wire Transmitter 0 … 10V Spare ....................... 4 Wire Transmitter 0 … 20 mA % 6600 0 Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS Definitions • Deterministic System • System that for each possible state and set of inputs, a unique set of outputs and the next state of the system are known Importance of thorough system specification and testing • 2OI – 2nd Order Ignorance- “You cannot test for things you don’t know you don’t know” • Temporal Determinism • Response Time is also known • Critical and extra reqd for RTS Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS Definitions • CPU Utilisation (U) • Measure of the percentage of non-idle processing • 70% is useful rule of thumb based on scheduling theory (cf later) • Consider task 1 n where • task i has period p i ,freq of 1/pi and worst case execution time ei • ei can be very difficult to quantify • Utilisation factor (worst case) for task i ; ui = ei / pi • Overall CPU U= Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS Components • Hardware • Specific to application • Tend to be I/O intensive • Power Systems • Fly-by-wire • MM: VoIP • Software • Specific to Application • Assembly language / C widely used • Interface directly with hardware • RT Programming Languages • Power Systems: Siemens OEM Programming Language • Ada is most recognised Real Time Lang. (RealTime Java?) • Boeing 777 control written in Ada Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS Components • RTOS • Many Hard RTS do not have an OS as such • Cyclic Executive approach used • OS introduces too much complexity • OS not needed if embedded device is simple enough or can be very well defined • Soft-Firm RTS often utilise RTOS • Facilitates multiple concurrent processes • Requires Scheduler • Memory Management Process Priorities ensure determinism Eg. Mobile Phones / PDA / Network Switches • Increasing use in Hard RTS : Mars Pathfinder • Note: Conventional OS can be adequate for Soft/Firm RTS Dr. Hugh Melvin, Dept. of IT, NUI,G
Simple Control System Process Field Inputs / Outputs Conveyor Belt Taco-generator Drive Unit E Signal Conditioning Y Process Control Processor (incl ADC/DAC) Thyristor Drive Unit Belt Running Drive Temp High Speed Setpoint Operator Interface Dr. Hugh Melvin, Dept. of IT, NUI,G
Less simple control System : Boeing 777 Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS Components • Fault Tolerant Techniques • Full/Partial Fault Tolerance • Hardware Redundancy • Voting schemes • Software Redundancy • N-version Programming • Time Redundancy • Build in time slack or roll back • Information Redundancy • Error Detection + Correction • FEC & PLC techniques • Note: TCP-IP based Error Detection via CRC relies on Time Redundancy for TCP traffic. Not acceptable for UDP based MM traffic • Graceful degradation • Failsafe operation Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS Components • Common hydraulic system for Steering, Brakes and Suspension • Failsafe operation • Suspension • Braking • Steering Dr. Hugh Melvin, Dept. of IT, NUI,G
CPU 1 CPU 2 CPU 3 DB-Out DB-Out DB-Out DB-In DB-In DB-In 2-out-of-3 2-out-of-3 2-out-of-3 ZV3 ZV1 ZV2 Central Unit 2-out-of-3 2-out-of-3 2-out-of-3 ZV1 ZV2 ZV3 EAVn 2-out-of-3 Extension Units I/O Level Inputs Outputs RAM EPROM 3 RAM EPROM 1 RAM EPROM 2 Fault Tolerant Techniques Dr. Hugh Melvin, Dept. of IT, NUI,G
Fault Tolerant Techniques: Airbus • 3 Main Flight Controllers • 2 Backup Flight Controllers • Software developed by different teams and on different platforms • Seamless transfer • ..See video ! Dr. Hugh Melvin, Dept. of IT, NUI,G
RTS: Closing Remarks • RTS are more concerned with predictability of response times rather than absolute response times • Providing faster processors will convert a PC (Soft RTS) to a faster PC (Soft RTS), not a Hard RTS. • Many Hard RTS are embedded devices • Specific hardware • Customised and limited software • No OS • Guarantees are provided through simplicity, precise definition and overprovisioning • Distinction between Soft-Firm RTS vague Dr. Hugh Melvin, Dept. of IT, NUI,G

![[Multi-RTS Proposal]](https://cdn5.slideserve.com/9736156/multi-rts-proposal-dt.jpg)