Download
1 / 1
20 likes | 127 Vues
Teaching Sensorimotor Skills with Haptics. Miloš Žefran , ECE; Matteo Corno , ECE; Maxim Kolesnikov , ECE Primary Grant Support: NSF; UIC College of Dentistry. New surgical procedures are introduced at a high rate. Each requires costly training.

E N D
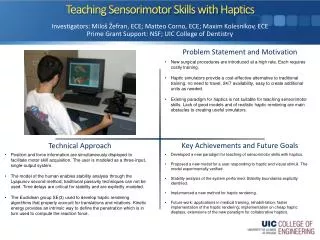
Teaching Sensorimotor Skills with Haptics MilošŽefran, ECE; MatteoCorno, ECE; Maxim Kolesnikov, ECE Primary Grant Support: NSF; UIC College of Dentistry • New surgical procedures are introduced at a high rate. Each requires costly training. • Haptic simulators provide a cost-effective alternative to traditional training: no need to travel, 24/7 availability, easy to create additional units as needed. • Existing paradigm for haptics is not suitable for teaching sensorimotor skills. Lack of good models and of realistic haptic rendering are main obstacles to creating useful simulators. • Position and force information are simultaneously displayed to facilitate motor skill acquisition. The user is modeled as a three-input, single-output system. • The model of the human enables stability analysis through the Lyapunov second method; traditional passivity techniques can not be used. Time delays are critical for stability and are explicitly modeled. • The Euclidean group SE(3) used to develop haptic rendering algorithms that properly account for translations and rotations. Kinetic energy provides an intrinsic way to define the penetration which is in turn used to compute the reaction force. • Developed a new paradigm for teaching of sensorimotor skills with haptics. • Proposed a new model for a user responding to haptic and visual stimuli. The model experimentally verified. • Stability analysis of the system performed. Stability boundaries explicitly identified. • Implemented a new method for haptic rendering. • Future work: applications in medical training, rehabili-tation; faster implementation of the haptic rendering; implementation on cheap haptic displays; extensions of the new paradigm for collaborative haptics.