Download
1 / 84
920 likes | 1.83k Vues
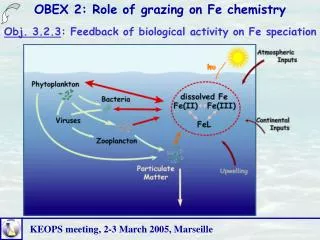
인간공학 II (2005 년 2 학기 ISIE368) 강의 3 : 생체역학. 홍승권. 서론. 가장 흔한 두 가지 근골격계 문제 (musculoskeletal problems) 하요통 (low back pain) 보상비 및 간접 비용 270 억 달러 ~560 억 달러 상지의 누적성 외상 장애 (upper extremity cumulative trauma disorders): 손가락 , 손 , 팔목 , 팔 그리고 어깨 산업체에서 매년 근로자의 10 명중 한 명. 서론 (11 장의 강의내용 ).

E N D
인간공학 II(2005년 2학기 ISIE368)강의 3 : 생체역학 홍승권
서론 • 가장 흔한 두 가지 근골격계 문제(musculoskeletal problems) • 하요통(low back pain) • 보상비 및 간접 비용 270억 달러 ~560억 달러 • 상지의 누적성 외상 장애(upper extremity cumulative trauma disorders): 손가락, 손, 팔목, 팔 그리고 어깨 • 산업체에서 매년 근로자의 10명중 한 명.
서론 (11장의 강의내용) • 근골격계의 구조와 속성 • 근골격계 체계 (뼈, 연결구조, 근육) • 생체역학 모델 • 하요부 장애 • 하요부 생체역학 • NOISH 들기지침 • 수동 물질취급 • 앉은 자세작업과 좌석설계 • 상지 누적성 외상장애 • CTD의 주요형태 • CTD의 원인과 대처 • 수공구 설계
근골격 체계(1) • 근골격 체계 의 구성과 기능 • 뼈, 근육, 연결 조직으로 구성 • 신체 및 신체의 각 부위들을 지탱하고 보호하며, 자세를 유지하고, 신체운동을 만들어 내며, 열을 생성하고 체온을 유지 • 뼈 • 206개의 뼈:신체내부구조 보호, 상지 및 하지의 뼈들은 신체운동이나 활동을 지지.
근골격 체계(2) - 연결구조 • 연결구조 • 인대(ligaments) : 일종의 조밀한 섬유 조직이지만, 이것들의 기능은 뼈와 관절을 연결시켜주고 관절 부위에서 뼈들이 원활하게 협응할 수 있도록 함 • 건(tendons) : 근육을 뼈에 부착시키고 있는 조밀한 섬유 조직으로 근육에 의해 발휘된 힘을 뼈에 전달해 주는 기능. • 근막(fascia) :근육과 다른 신체 구조물을 둘러싸서 이것들을 서로 분리시키는 역할. • 연골(cartilage) : 관절뼈의 표면, 코 그리고 귀 같은 신체 기관에서 볼 수 있는 것으로 반투명의 탄력적인 조직.
근골격 체계(3) - 관절 • 관절의 유형 (뼈 연결부위) • 활액 관절(synovial joints) : 관절 표면에 조직이 없고 대신 관절 표면 사이에 윤활액이 분비된다. • 섬유 관절(fibrous joints) : 두개골의 뼈들처럼 섬유 조직에 의해 연결되어 있는 관절 • 연골 관절(cartilaginous joints) : 추간 원판(intervertebral discs) 같은 척추 뼈들을 연결.
근골격 체계(4) - 관절 • 관절의 유형 (관절의 동작 유형) • 비운동성 관절(no-mobility joints) : 성인의 두개골 봉합선(seam)처럼 동작을 허용하지 않음. • 경첩 관절(hinge joints) : 팔꿈치 관절처럼 한쪽 평면만으로 동작을 허용 • 축 관절(pivot joints) : 두 평면으로 동작 할 수 있도록 하는 것으로 팔목 관절이 여기에 해당 • 구형 관절(ball-and-socket joints): 고관절(hip joints)이나 어깨 관절(shoulder joint)등이 포함.
근골격 체계(5) - 근육 • 약 400개의 근육 • 근육들은 대략적으로 체중의 40~50%차지 • 근육들은 신체 에너지의 거의 반을 소비 • 이 에너지는 신체의 자세를 유지하거나 • 신체 운동을 생성하는데 것뿐만 아니라, • 열을 생성해내고 체온을 유지하는데도 사용됨
근골격 체계(6) - 근육 • 근육의 구성 • 근섬유(muscle fibers), 연결 조직(connective tissues) 그리고 신경(nerve)들 • 근섬유 • 긴 원주형 세포로 대부분 근원섬유(myofibrils)라고 불리는 수축성 요소들로 구성 • 근육의 연결 조직 • 신경이나 혈관이 근육 속으로 드나들 수 있는 경로를 제공 • 신경섬유 • 근육들은 감각 신경 섬유(sensory nerve fibers)와 운동 신경 섬유(motor nerve fibers)를 갖고 있음
근골격 체계(7) - 근육 • 신경섬유 • 감각 신경 섬유(sensory nerve fibers) : 근육의 길이나 긴장도(tension)에 대한 정보를 중추 신경계로 전달 • 운동 신경 섬유(motor nerve fibers) : 근육 활동을 통제, 운동 신경 섬유는 중추신경으로부터 오는 임펄스(impulse)를 근육에 전달. • 운동단위(motor unit) : 근육의 가장 기본적인 기능 단위 • 각각의 운동 신경 섬유는 이것의 가지들(branches)을 통해서 관련된 근육 섬유들을 통제. • 동일한 운동 신경 섬유 가지들에 의해 통제되는 근육 섬유 집단을 운동단위(motor unit)라고 부름 • 동일한 운동 단위로, 이것들은 신경 섬유로부터 오는 임펄스에 대해 거의 동시에 반응하거나 혹은 전혀 반응하지 않음.
근골격 체계(8) –근육의 수축 • 근육의 수축의 역할 • 근육의 수축은 근력(muscle force)이나 근긴장(muscle tension)을 산출해내고 • 이것들은 건(tendons)을 통해 뼈에 전달되어 신체의 자세를 유지하거나 육체적 작업을 하는데 사용. • 동심형 수축(concentric contraction) • 등장형 수축(isotonic contraction) • 수축할 때 근육이 짧아지며 동등한 내적 근력(internal muscle force)을 산출. • 근 수축이 일어나면 실제 근육의 길이도 줄어드는 경우를 말하는 경우 • 예) 무게를 손에 쥐고 팔을 구부릴 때 이두박근의 운동
근골격 체계(9) –근육의 수축 • 편심형 수축(eccentrical contraction) • 수축할 때 근육이 길어지는 것으로 이것은 내적 근력보다 외부의 힘이 더 클 때 발생 • 근 수축은 일어나지만 실제 근육의 길이는 오히려 늘어나는 경우 • 예) 팔굽혀 펴기 혹은 윗몸 일으키기에서 중력에 대하여 몸을 천천히 떨어지게 하기 위해 대흉근(pectoralis major)이나 복근(rectus abdo- minis)에서 일어나는 운동. • 등척형 수축(isometric contraction) • 수축 과정 중에 근육의 길이가 변하지 않음 • 물체를 들다가 멈춘 후 그것을 안정적인 위치에서 들고 있을 때 발생.
근골격 체계(10) –근력 • 근력(muscle strength) • 근육 안에서 발생하는 긴장(tension)의 정도를 직접적으로 측정할 수 없음 • 따라서 근육이 발휘하는 힘의 양이나 토오크(torque)에 기초해서 추정 • 뒤틀림 모멘트(moment)라고도 불리는 토오크는 일반적으로 뒤틀 수 있는 힘의 정도를 말하며, • 예를 들어, 팔꿈치나 어깨에 있는 관절을 회전축으로 하는 팔의 회전에 의해 발생된 토오크. • 근력의 종류(힘의 발휘조건에 따라) • 정적근력과 동적근력
근골격 체계(11) –근력 • 정적근력 • 정적 근력은 등척력(isometric strength)이라고 함 • 정적 근력은 4~6초 동안 피험자들이 고정된 물체에 대해 최대한 발휘하도록 한 후 • 30~120초 동안 휴식을 취하게 하는 과정을 몇 번 반복하여 • 처음 3초 동안에 발휘된 근력들의 평균을 계산하여 측정 • 동적근력 • 신체의 가속(body acceleration)이 측정하고자 하는 근력에 많은 영향을 주기 때문에 측정이 어려움 • 발휘되는 운동의 힘에 관계없이 신체의 운동 속도를 일정하게 유지할 수 있도록 특별하게 설계된 등속도 실험 장치(isokinetic equipments)들을 사용 • 정신물리학적 방법 : 각 시행에 따라 자신들이 발휘할 수 있는 최대 능력에 이르렀다고 생각될 때까지 부하를 올리거나 내리는 시행을 반복하도록 요구.
신체역학 모델 (1) • 생체역학 모델 • 생체역학적 모델에서는 근골격 체계들을 일종의 기계적인 링크 연결 구조로서 분석 • 특정 근골격 요소에 부과되는 스트레스 수준을 수량적으로 예언 • 직무를 설계하는데 도움이 되는 분석적 도구로서 기능 • 뉴유튼의 세가지 물리학적 법칙에 기초 • 물체는 불균형적인 외부의 힘이 작용하지 않는 한 일정한 운동 상태로 혹은 정지 상태로 남아있게 된다. • 힘은 물체의 가속도에 비례한다. • 작용은 이와 같은 힘의 크기를 갖는 반작용을 받는다.
신체역학 모델 (2) • 정적 평형상태(static equilibrium)란? • 신체(body)나 체절(body segment)이 움직이지 않을 때 • 두 가지 조건을 충족 • 정적 평형상태에 있는 대상에 대해 작용하는 모든 외부적 힘의 총합은 0. • 정적 평형상태에 있는 대상에 대해 작용하는 모든 외부 모멘트의 총합은 0. • 평면적, 정적 모델들(planar, static models) • 평면적 모델들(planar models: 때로 2차원적 모델)은 단일 평면에 힘이 작용하는 대칭적 신체 자세를 분석 • 정적 모델들(static models)은 사람들이 신체 전체나 혹은 신체 일부(즉, 체절)를 전혀 움직이지 않고 정적인 자세를 취하고 있는 상황을 가정
단일체절에 대한 평면적 정적 모델(1) • 예제> • 어떤 사람이 20kg의 무게 물체를 두 손으로 • 전완을 지면과 평행하게 유지 • 하중은 두 손에 동등하게 분배되어 있으며, • 그 물체와 팔꿈치 사이의 거리는 36cm • 그 사람의 팔꿈치에 작용하는 힘과 회전 모멘트는 역학 법칙을 사용하여 결정.
단일체절에 대한 평면적 정적 모델(3) • 먼저, 하중은 다음과 같은 공식으로 계산될 수 있다; W = mg 여기서 W는 뉴유튼(N) 단위로 측정된 대상의 무게, m은 킬로그램(kg) 단위로 측정된 대상의 질량, g는 중력 가속도(상수 9.8m/s2). W = 20kg х 9.8m/s2 = 196N
단일체절에 대한 평면적 정적 모델(4) • 각 손이 지탱해야 하는 무게 • 두 손에 무게가 동등하게 분배되어 있기 때문에 • Won-each-hand = 98N • 전형적인 성인 작업자의 경우 • 전완-손 체절(forearm-hand segment)의 무게는 16N이고 • 전완-손 체절과 팔꿈치의 질량 중심 사이의 거리는 18cm.
단일체절에 대한 평면적 정적 모델(5) • 팔꿈치의 반작용력 Relbow • 평형상태의 첫 번째 조건을 사용하여 계산. • Relbow는 위쪽으로 향하고 있고, • 물체와 전완-손 체절의 하중은 아래쪽 • 팔꿈치에서의 힘의 총합 = 0 -16N - 98N + Relbow = 0 Relbow = 114N
단일체절에 대한 평면적 정적 모델(6) • 팔꿈치 모멘트 Melbow • 평형상태의 두 번째 조건을 이용하여 계산 • 물체와 전완-손 체절의 하중에 의해 만들어진 시계 방향으로의 모멘트 • 이와 같은 크기를 갖는 시계 반대 방향으로의 Melbow에 의해 상쇄. • 팔꿈치에서의 모멘트의 총합 = 0 (-16N)(0.18m) + (-98N)(0.36m) + Melbow = 0 Melbow = 38.16N – m
두 개 체절에 대한 평면적 정적 모델(1) • 2-체절 모델(two-segments model)의 한 가지 예> • 어깨나 척추 부분과 같이 외부의 하중으로부터 좀 더 떨어져 있는 신체 관절 부위 • 일종의 연결된 링크들(link)로 간주하여 육체적 스트레스의 크기를 계산 • 앞의 단일 체절 모델의 설명에서 예로 들었던 상황을 바탕 • 이 사람의 팔꿈치와 어깨 사이의 거리는 34cm이고, • 상완(upper arm)의 무게는 20N이며, • 상완과 전완은 모두 지면과 평행하다고 가정.
두 개 체절에 대한 평면적 정적 모델(3) • 전완의 관점에서 (앞 예시) • 팔꿈치의 반작용력 Relbow는 위쪽 방향으로 114N이고, • 팔꿈치 모멘트 Melbow는 시계 반대 방향으로 38.16 – m • 상완의 관점에서 본다면 • 팔꿈치의 반작용력은 아래쪽으로 작용하고 있으며, • 팔꿈치의 모멘트는 시계방향으로 작용하고 있음. • 이러한 방식으로 전완으로부터 상완까지 팔꿈치 힘과 팔꿈치 모멘트가 “전이”됨
두 개 체절에 대한 평면적 정적 모델(4) • 상완에 초점을 두고 어깨에 주어지는 힘과 모멘트를 계산. • 평형상태의 첫 번째 조건을 사용하여 계산 • 어깨의 반작용력 Rshoulder • 어깨에서의 총합 = 0 R’elbow - Wupper- arm + Rshoulder = 0 Rshoulder = R’elbow + Wupper- arm = 114N + 20N = 134N
두 개 체절에 대한 평면적 정적 모델(5) • 어깨의 반작용 모멘트 Mshoulder (두 번째 조건) • 어깨에서의 모멘트의 총합 = 0 -36.16N – m + (-114N)(0,34m)+ (-20N)(0.14m) + Mshoulder = 0 Mshoulder = 79.72N –m(시계 반대 방향) • 2-체절 모델과 단일-체절 모델의 계산 결과비교 • Mshoulder는 Melbow의 두 배보다 더 크다 • 어깨 관절이 하중으로부터 더 멀리 떨어져 있을 뿐만 아니라 상완과 전완의 무게가 어깨에 스트레스를 주기 때문. • 일반적으로 모멘트는 작용선(line of action)으로부터 회전 중심점(point of rotation)까지의 수직 거리와 힘을 곱한 값 • 하중으로부터 가까운 관절보다 더 멀리 떨어진 관절에서의 모멘트가 더 크게 됨.
하요부 장애 • 의료비 • 하요부 통증으로 인한 의료비는 전체 근로 보상액의 거의 3분의 1 • 간접적인 비용까지 포함 한다면, • 전체 비용 총액은 270억 달러~ 560억 달러로 추정 (미국). • 하요부 통증 인구 • 직업적 요인이나 다른 요인들에 의한 고생하는 사람들은 전체 인구의 50~70 퍼센트 • 두 개의 중요한 직무 상황 • 수동 물질 취급작업 • 앉은 자세 작업.
들기와 하요부 생체역학 (1) • L5/S1 요천부 디스크 (L5/S1 lumbosacral disc) • 제5요추골(lumbar vertebrae)과 제1천골(sacral vertebrae)사이의 디스크에 심각한 신체적 스트레스. • L5/S1 디스크에서의 반작용력과 모멘트를 계산하기 위해 • 중다체절 모델(multisegment model)을 적용 • 뿐만 아니라 횡격막(diaphragm)과 복벽 근육(abdominal wall muscle)에 의해 만들어지는 복압(abdominal pressure)도 고려
들기와 하요부 생체역학 (2) • 물체하중과 상반신의 회전 모멘트 Mload-and-torso = Wload х h + Wtorso х b 여기서, h는 하중으로부터 L5/S1 디스크까지의 수평적 거리 b는 상반신의 무게 중심으로부터 L5/S1 디스크까지의 수 평적 거리. • 상쇄 회전 모멘트 Mback-muscle = Fback-muscle х 5(N-cm) 이 모멘트는 5cm의 모멘트 암(moment arm)을 가진 등 근육에 의해 만들어짐
들기와 하요부 생체역학 (3) • 두 번째 조건, L5/S1에서의 모멘트의 총합 = 0 Fback-muscle х 5 = Wload х h + Wtorso х b Fback-muscle = Wload х h/5 + Wtorso х b/5 • h와 b는 항상 5cm보다 훨씬 더 크기 때문에 Fmuscle은 하중과 상반신의 무게를 합한 것보다 언제나 더 큼. • 예를 들어, 어떤 전형적 들기 상황에서 h = 40cm 이고 b = 20cm라고 한다면, Fmuscle = Wload х 40/5 + Wtorso х 20/5 = 8 х Wload + 4 х Wtorso
들기와 하요부 생체역학 (4) • Fmuscle = 8 х Wload + 4 х Wtorso • 등 근육의 힘은 하중의 8배와 상반신 무게의 4배를 합한 것임 • 상반신 무게가 350N인 어떤 사람이 300N(약 30kg)의 하중을 가정 • 공식에 의하면, 이 사람의 등 근육 힘은 3,800N이 됨 • 만일 이 사람이 450N의 하중, • 공식에 따라 등 근육의 힘은 5,000N • 강도 능력의 범위를 2,200~5,500N로 추정 (Farfan, 1973)
들기와 하요부 생체역학 (5) • 하요부의 근력뿐만 아니라 L5/S1 디스크의 압착력(compression force)도 함께 고려 • 이것은 첫 번째 조건에 기초하여 추정. • L5/S1 디스크의 힘의 총합 = 0 Fcompression = Wload х cos α х Wtorso х cos α + Fmuscle • 대략적으로 추정하기 위해, 복부의 힘 fa는 무시하고 다음과 같은 공식을 사용 • 여기서 α는 수평면(horizontal plane)과 천골 절단면(sacral cutting plane)사이의 각도로서, 디스크 압착력의 방향과 직각을 이룸.
들기와 하요부 생체역학 (6) • 이 공식은 디스크 압착력이 근력보다 훨씬 더 클 수 있다는 것을 시사. • 예를 들어, α = 55° 라고 가정. 350N의 상반신 무게를 갖는 사람이 450N의 하중을 들어올린다면, Fcompression = 450 х cos55° + 350 х cos55° +5000 = 258 + 200 +5000 = 5458N • 들기 과제들을 수행할 때 척추에 영향요인들 • 척추의 중심점에 대한 하중의 무게와 거리 • 상반신을 뒤트는 정도, 대상의 크기와 형태 그리고 대상이 옮겨지는 거리 등이 포함.
NIOSH WPG for Manual Lifting • The NIOSH Work Practices Guide (WPG) for Manual Lifting (1981) • Review and summarize current knowledge with regard to manual material handling. • Provide concrete guidelines to assist industry in the prevention of overexertion injuries during lifting.
1981년 지침의 특성 • 두 가지 종류의 권고치 설정: • 조치한계(Action Limit: AL) : 장애나 피로가 증가할 수 있다고 판단되는 수준 • 최대허용한계(Maximum Permissible Limit: MPL): • 조치한계의 3배 • 대부분의 근로자에게 근골격계 장애 유발
들기 공식의 가정(1) • 들기 공식은 생체 역학, 정신물리학 그리고 작업 생리학 분야의 연구 결과들과 이 분야의 전문가들에 의한 판단에 기초 • 생체역학적 기준 • 하요부 상해의 위험성을 증가시키는 L5/S1 디스크에서의 압착력 수준을 3.4kN으로 규정. • 압착력은 디스크 탈골(disc herniation), 추골 종판 파열(vertebral end-plate fracture) 그리고 신경근 염증(nerve root irritation)과 같은 디스크 상해의 주원인.
들기 공식의 가정(2) • 생리학적 기준 • 걷기, 운반 그리고 반복적인 하중 들기와 같은 활동들은 근육들을 더 많이 사용 • 따라서 이러한 종류의 활동들은 더 많은 에너지를 소비 • 이때 소비되는 에너지량은 작업자의 에너지 생산 능력을 초과해서는 안 됨 • 들기 과제에 대한 최대에너지 소비 한계는 2.2kcal/min에서 4.7kcal/min에 이름
들기 공식의 가정(3) • 정신물리학적 기준 • 작업자들에게 무리하지 말고, 비정상적으로 피곤해 지거나, 약해지거나, 열이 올라가거나, 숨이 차는 일이 없이 할 수 있는 한 최대로 작업하도록 요구하고, 그 때 작업자가 견딜 수 있는 무게. • NIOSH 들기 공식에 적용된 정신물리학적 기준은 주어진 들기 요구량이 남성 작업자의 99 퍼센트, 여성 작업자의 75 퍼센트에 해당하는 사람들의 최대 수용 들기 능력을 초과하지 않도록 규정
1991년 NIOSH 기준 • 권고중량한계(Recommended Weight Limit: RWL) • 작업시간(8시간) 동안 들기작업을 할 수 있는 작업물의 무게 • 1981년 조치한계에 사용되었던 수평위치, 수직위치, 수직이동거리, 작업빈도 계수 이외에 비대칭 각도 계수와 손잡이 계수까지 고려 • 수직이동거리는 작업물의 수직위치에서 작업물의 처음위치를 뺀 값
RWL 공식 • RWL = LCHMVMDMAMFMCM
Standard Lift Location • Vertical position: 75 cm from the floor. • Horizontal position: 25 cm from the midpoint between the ankles.
Load Constant • The load constant is the maximum recommended weight for lifting at the standard lift location under ideal conditions. • LOAD CONSTANT: 23 kg (51 lbs)
Horizontal Multiplier • HM = (25/H) • H = horizontal distance (in cm) of the hands from the midpoint between the ankles. Measure at the origin and destination of lift.
Multiplier 1.2 1 0.8 0.6 0.4 0.2 0 20 30 40 50 60 70 80 Horizontal Distance (cm) Horizontal Multiplier
Vertical Multiplier • VM = (1-(0.003|V-75|)) • V = vertical distance (in cm) of the hands from the floor. Measure at the origin and destination of lift.
Vertical Multiplier Multiplier 1.2 1 0.8 0.6 0.4 0.2 0 0 20 40 60 80 100 120 140 160 180 Vertical Distance (cm)
Distance Multiplier • DM = (0.82 +(4.5/D)) • D = vertical travel distance (in cm) between the origin and destination of the lift.