Download
1 / 31
310 likes | 390 Vues
Overview Class #5 (Thurs, Jan 30). Rigid body contact Read B&W course notes on Collision and Contact Constraint formulation Lagrangian Reduced coordinate Cool applications! Graphics literature. Rigid Body Dynamics. Rotations from last day; One last thing… Quaternions.

E N D
OverviewClass #5 (Thurs, Jan 30) • Rigid body contact • Read B&W course notes on • Collision and Contact • Constraint formulation • Lagrangian • Reduced coordinate • Cool applications! • Graphics literature
Rotations from last day;One last thing… Quaternions • Obey same SO(3) group structure as the rotation matrices • Efficient 4-vector representation of rotations that do not suffer mathematical singularities • Briefly on the whiteboard… • See also: • Murray, Li, Sastry, “A Mathematical Intro. to Robotic Manipulation,” (p. 33) (Handout) • Andrew Hanson, “Visualizing Quaternions,” SIGGRAPH 2001 Course Notes, 2001. (Fun with Clifford Algebras!) • And Baraff course notes.
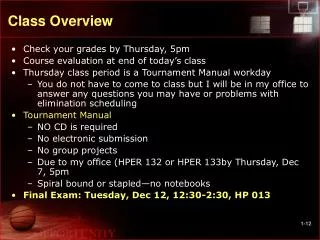
Contact Separation Distance • Simple/common idea for rigid contact • Signed distance function, =(gA,gB) • >0 : Separated • =0 : In contact • <0 : Rigid interpenetration A B A B A B
(some images from Piet van Dijk, “Contact Spots,” Proc. 20th Conf. On Electrical Contacts ICEC, 2000.) A little history: Hertz Contact • Idealized quasistatic contact between spheres • H. Hertz, Über die Berührung fester elastischer Körper, Gesammelte Werke, Bd. 1, Leipzig 1895. f 3/2
Reality of “spherical contact”… • Real surface contact problems are complex! • Models of surface contact (and friction) are highly approximate in practice • Not a serious problem for graphics… • … important for contact sounds (will discuss later)
Penalty Methods • Penalty spring force • More sophisticated models use damping • For example:
Contact Response Maps • Ullrich & Pai, Contact Response Maps for Real Time Dynamic Simulation, ICRA, 1998. • Convolve contact forcing with the precomputed impulse response function of a linear elastodynamic model. • Generalized force response model • Includes effect of vibration and internal shock waves produced by contact
Impulse Response Contact Models • Brian Mirtich and John F. Canny, Impulse-Based Simulation of Rigid Bodies, Symposium on Interactive 3D Graphics, 181-188, 1995.
The Linear Complementarity Problem (LCP) • Formulation of the contact force problem • Famous mathematical problem • Briefly (on whiteboard) • See papers on webpage, e.g., by Baraff, Trinkle, Anitescu, etc.
Constrained vs Reduced Coordinate Approaches • Fast Lagrange multipliers • D. Baraff. Linear-time dynamics using Lagrange multipliers, SIGGRAPH 96. • Ascher, Pai, Cloutier, Forward Dynamics, Elimination Methods, and Formulation Stiffness in Robot Simulation, 1997 • Reduced coordinates • Difficult to exploit in general contact animations • Robotic assemblies important special case; see [Featherstone; Murray, Li, Sastry]
Dynamics with Smooth Surface Contact • P. G. Kry, and D. K. Pai, Continuous Contact Simulation for Smooth Surfaces, ACM Transactions on Graphics, Jan 2003.
Other Issues • Constraints with closed loops • Mathematically tricky DAEs (Differential Algebraic Equations) • For details see, e.g., • François Faure, Fast Iterative Refinement of Articulated Solid Dynamics, IEEE Transactions on Visualization and Computer Graphics, 5(3), pp. 268-276, 1999. • U. Ascher and P. Lin, SIAM J. Scient. Comput. 21 (1999), 1244-1262: Sequential Regularization Methods for simulating mechanical systems with many closed loops)
Parallel Computation • Large scale rigid body simulation • Time-warp approach from discrete simulation
Cool Applications • Graphics is interested in more than just rigid body mechanics fundamentals
Random Sampling of Rigid Motions • Stephen Chenney and D.A.Forsyth, "Sampling Plausible Solutions to Multi-Body Constraint Problems". SIGGRAPH 2000 Conference Proceedings, pages 219-228, July 2000. • MOVIE: 30 balls fall into 105 bins. These solutions were hand chosen from a chain that produced several hundred examples in 200000 iterations, taking seven days to compute on a PC. The longer computation time is due to the greater number of balls, because each simulation takes longer and the constraints are much harder to satisfy.
Placement of Rigid Objects in Scenes John Snyder, An interactive tool for placing curved surfaces without interpenetration, SIGGRAPH 95.
Interactive Manipulation of Rigid Body Simulations • Jovan Popovic, Steven M. Seitz, Michael Erdmann, Zoran Popovic, and Andrew Witkin. Interactive Manipulation of Rigid Body Simulations. In Computer Graphics (Proceedings of SIGGRAPH 2000), ACM SIGGRAPH, Annual Conference Series, 209-217.
Evolving Virtual Creatures • Sims, K., "Evolving Virtual Creatures," Computer Graphics (Siggraph '94) Annual Conference Proceedings, July 1994, pp.43-50.
Sims, K., "Evolving Virtual Creatures," Computer Graphics (Siggraph '94) Annual Conference Proceedings, July 1994, pp.43-50.