Download
1 / 15
150 likes | 273 Vues
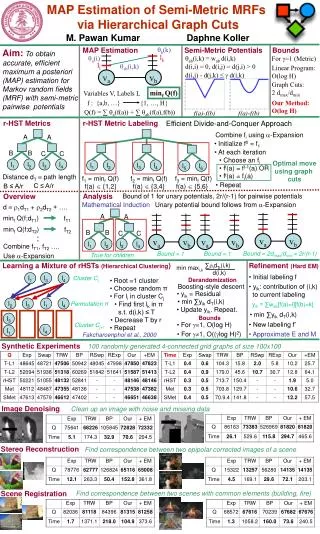
MAP estimation in MRFs via rank aggregation. Rahul Gupta Sunita Sarawagi (IBM India Research Lab) (IIT Bombay). Background. Approximate MAP estimation a must for complex models used in collective inference tasks Min-cuts, belief propagation, mean field, sampling

E N D
MAP estimation in MRFs via rank aggregation Rahul Gupta Sunita Sarawagi (IBM India Research Lab) (IIT Bombay)
Background • Approximate MAP estimation a must for complex models used in collective inference tasks • Min-cuts, belief propagation, mean field, sampling • Family of Tree Re-weighted BP1 algorithms • Decompose graph into trees • Perform inference on trees and combine results • Can we generalize and do better? • Can we provide better upper bounds on the MAP score? 1[Wainwright et.al.’05, Kolmogorov ’04]
Goal • Efficient computation of the MAP solution (xMAP), using inference on simpler subgraphs OR • Return an approximation (x*,gap) s.t. Score(xMAP) – Score(x*) < gap
MAP via rank-aggregation • [Step 1] Decompose graph potentials into a convex combination of simpler potentials • E.g. Set of spanning trees that cover all edges = + + T1 + T2 + T3 G = Score(x) Score1(x) Score2(x) Score3(x) = + + =>
Rank aggregation (contd.) • [Step 2] Perform top-k MAP estimation on each constituent and compute upper bound (ub) S1 : x1 x2 x3 x4 x5 x6 x7 x8 ub = score1(x8) Si : x7 x20 x4 x1 x9 x11 x8 x2 + scorei(x2) SL : x15 x6 x2 x8 x22 x3 x5 x4 + scoreL(x4) ties
Rank-Merge • [Step 3] Merge the ranked lists using the aggregate function Score(x) = i Scorei(x) Computed directly from the model x1 x2 x3 x4 x5 x6 x7 x8 x2 x1 x8 x7 x20 x4 x1 x9 x11 x8 x2 x* (MAP estimate) x15 x6 x2 x8 x22 x3 x5 x4
Rank-Merge (contd.) • If Score(x*) ≥ ub, then xMAP = x* • From the property of RankMerge algorithm • If Score(x*) < ub, then Score(xMAP) < ub • From convexity of ‘max’ and decomposition of G • Tighter bounds can be obtained by increasing k • Can do even better • Generate top-K and upper bounds ubi incrementally.
TRW-BP Generates bounds only from K=1 Outputs xMAP only when all trees agree on a common MAP May require enumerating all MAPs if MAP is not unique Comparison with Tree Re-weighted BP Rank-Aggregation • Tighter bounds obtainable by increasing K • xMAP does not have to be in ALL the lists • No agreement criteria • Comparison with ub sufficient • xMAP need not be the best in any list.
Reparameterization • No guarantee that xMAP will be in the top-K list of ANY tree • Need to align tree potentials with the max-marginals of the graph • Can use existing reparam algorithms: TRW-T, TRW-E, TRW-S • TRW-S most expensive but gives monotonically decreasing bounds and converges fastest. • Rank-aggregation gives significant improvements with all the reparameterization algorithms. G ’G reparam s.t. ScoreG(x) ´ Score’G(x) = iTi = i’Ti
Final Algorithm Construct potentials for simpler constituents Get Top-k MAP estimates for each constituent Rank Aggregate the sorted lists Reparameterize graph potentials next iteration found (X*, 0) bored neither (X*, gap)
Experiments (synthetic data) • Improves even upon TRW-S • Success in fewer iterations • Smaller gap values on failure • Effect much more significant for TRW-Tree and TRW-Edge Successes Failures
Experiments (real data) • Bibliographic data • 24 labels (AUTHOR, TITLE, ….), avg. record size 11. • Uniqueness constraints for some labels → Clique models • Substantially better MAP estimates and Gap values, less number of iterations.
Sensitivity to selection Behavior also depends on reparameterization! Experiments : Tree Selection Grid(M) Failures Clique(M) Failures Grid(M) Successes
Experiments : Gap Evolution Grids Cliques • Gap converges for RankAgg in both scenarios • Cliques: Erratic gaps shown by TRW-S • Bounds are monotonic but MAP-estimates are not!!
Summary and future work • Rank aggregation significantly better in MAP-estimation • Fewer iterations, Much tighter bounds, Low k. • No dependence on the tree-agreement criteria • Can generalize to non-tree constituents as long as top-k is supported. • Future work • Collective inference on constrained models • Intelligent constraint generation • Decrease sensitivity to tree selection