Download
1 / 31
310 likes | 387 Vues
A digital system consists of five components (U0,..,U4) from different vendors. Each vendor has built an agent capable of monitoring the component. Here, we assume identical faulty behavior of gates only for convenience. The core representation of each agent is a subnet (Di, I=0,…,4).

E N D
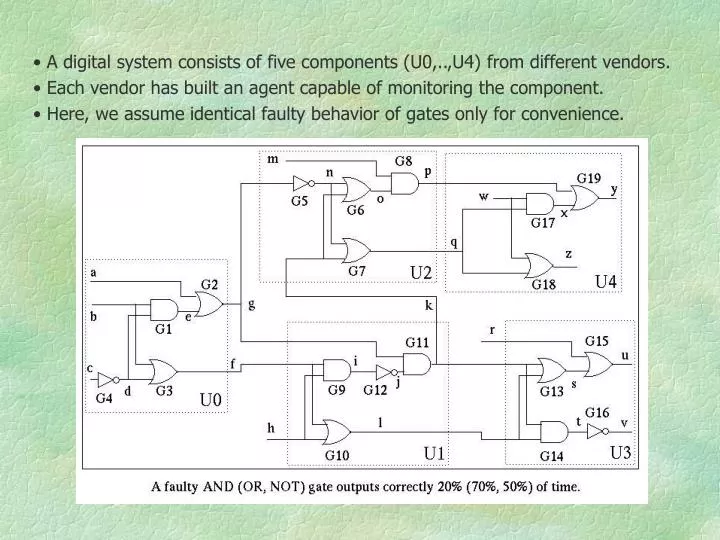
A digital system consists of five components (U0,..,U4) from different vendors. Each vendor has built an agent capable of monitoring the component. Here, we assume identical faulty behavior of gates only for convenience.
The core representation of each agent is a subnet (Di, I=0,…,4). The internal structure and parameter of each subnet is unknown to other vendors.
The agents are organized into a hypertree MSBN by the system designer who has only the knowledge of the interface between components.
If the system functions correctly, it should have the following state:
Unfortunately, G7 and G9 are faulty (unknown to agents). The actual state of the system is the following:
We assume that the actual state of each gate cannot be directly observed. The system input and output (u, v, y, z) can be cheaply observed, but other output of gates are costly to observe. In addition, the output k of G11 is not observable. We demonstrate how agents may cooperate to identify the faulty gates using MSBN framework. The demo is run in WEBWEAVR-II, a toolkit that I developed. The demo consists of a series of captured screens. Each agent’s belief is shown in histograms of corresponding variables. When a variable is observed, it is marked as yellow, otherwise it is green. First we show that agents cannot function effectively without cooperation.
Although agent 2 has made all six possible observations, it is still unsure whether gate G6 or G7 is abnormal (b: bad; g: good).
Next, we show how agents cooperate. Initially, each agent observes system input/output local to the agent.
Agent 1 is uncertain about the input/output of some gates. But nothing appears wrong.
Agent 4 feels something unusual, since when y=1, mostly likely z=1.
At this point, a communication is performed among agents. Note that only belief on interface but not the observations is communicated among agents. Agent 0 is no longer happy with the state of its component.
Agent 2 starts to worry that some of his gates may be abnormal.
Agent 4 suspects his gates as well. The inconsistent system input/output has alerted all agents. Suppose agents 1..4 make one more observation each.
Agent 1 observes j, which still does not resolve his uncertainty.
Agent 3 observes the value of t. The status of G14 is still unsure.
This is agent 3’s belief after communication, who has resolved his uncertainty on G14.
With an additional local observation on i, agent 1 is quite certain that G9 should be replaced.
Agent 4 makes observation on q, which resolves his uncertainty. Since q is in the interface with agent 3, the value is passed.
With the value of q from local communication with agent 4, now agent 2 is sure about the problem of its component. Through cooperation, the problem of G7 is identified with only 3 local observation. It was not possible with even 6 observations when agent 2 was working alone.