Download
1 / 15
190 likes | 503 Vues
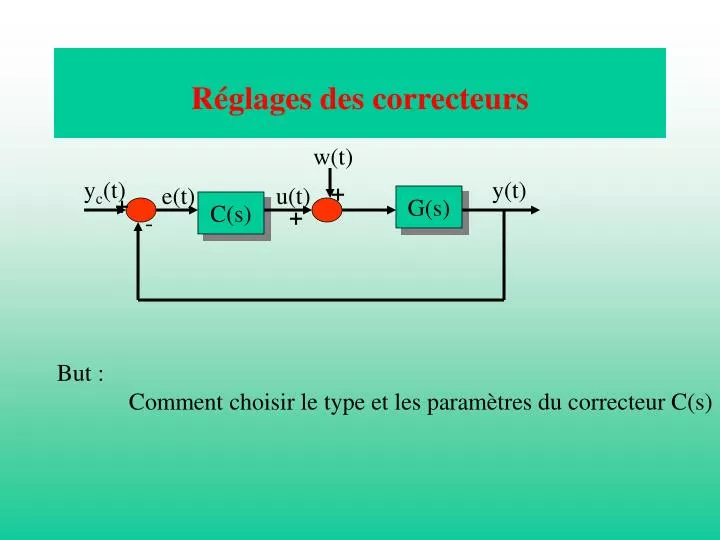
w(t). y c (t). y(t). +. e(t). u(t). +. G(s). C(s). +. -. Réglages des correcteurs. But : Comment choisir le type et les paramètres du correcteur C(s). Méthode de Naslin. But : Paramétrer les correcteurs en garantissant à la réponse indicielle un D%. On considère la FTBF.

E N D
w(t) yc(t) y(t) + e(t) u(t) + G(s) C(s) + - Réglages des correcteurs But : Comment choisir le type et les paramètres du correcteur C(s)
Méthode de Naslin But : Paramétrer les correcteurs en garantissant à la réponse indicielle un D% On considère la FTBF Le D% sera garanti ssi
Méthode de Naslin (ep=0 et ev=0) Si la FTBF Le D% sera garanti ssi (ep0 et ev0) Si la FTBF Le D% sera garanti ssi
Méthode de Naslin Mode d’emploi : - Calculer la FTBF - Calculer a - Calculer - Vérifier les conditions sans tenir compte du numérateur. - Calculer ac. Si ac=f(param correc), prendre les valeurs limites des paramètres (ac est constant). - Vérifier les conditions par rapport à ac. Exemple : Comment choisir Kp et Ti pour garantir un D% < 10% et une ep=0
Méthode de Ziegler Nichols Réglage par génération des oscillations entretenue G(t) y(t) + G(s) K - • On annule totalement les actions I et D . • On augmente progressivement l’action du P jusqu’à l’apparition • des oscillations entretenues. • On note la valeur critique du gain Kc et on mesure la période d’osci Tosc. • -Suivant le type de réglage choisi, les réglages recommandés sont : Correcteur P : KP =0.5 Kc Correcteur PI : KP =0.45 Kc, Ti =0.85 Tosc Correcteur PID : KP =0.6 Kc, Ti=0.5Tosc , Td =0.12 Tosc
Réglage à partir de la réponse indicielle en minimisant Tang(a)=k a Correcteur P : t Correcteur PID : Correcteur PI : Méthode de Ziegler et Nichols • On trace la réponse indicielle de G(s) • On trace la tangente qui passe par le • point d’inflexion. • On calcule les paramètres t et k de
Méthode de Graham-Lathrop Les auteurs ont cherché par simulation les FTBF F(s) à écart permanent nul en minimisant le critère J= e(t) désigne l’écart d’asservissement pour une entrée échelon . yc + min F(s) t -
Régulateur C1(s) Consigne Sortie + + C(s) G1(s)e-ts - - (1-e-ts)G1(s) Méthode de Prédicteur de Smith FTBF
Méthode de Prédicteur de Smith Consigne Sortie + C(s) G1(s) e-ts - Le correcteur C(s) peut être déterminé de façon classique pour compenser G1(s). La sortie conserve nécessairement un retard sur la consigne
+ C(s) G(s) - Réglage par compensation Réglage PD d’un intégrateur pur avec retard Le choix d’une action dérivée provoquant une avance de phase de p/4 pour la pulsation w0 de w déterminant un déphasage de –p. C-à-d arctg(Tdw0)=p/4 quand j(wà)=-p
Tdw0=1 -p=-p/2+p/4-tw0 |C(jw)G(jw)|=1 Si on veut Mg=6 dB alors kp1=kp/2 Si on veut Mg=14 dB alors kp2=kp/5 Réglage PI d’un premier ordre Si Ti=T Si on veut une constante de temps T1
Réglage PI d’un premier ordre avec retard Si Ti=T j=tw-p/2 Mg=6dB Si on veut une marge de gain de 6 dB j=-p Réglage PID d’un premier ordre avec retard Si Ti’=T Pour Mg>6dB Équivalent au 1 cas
Réglage PI d’un second ordre apériodique Si T2=Ti BO FTBF Pour x donné, on peut calculer kp
Réglage PID d’un premier ordre avec retard Si Ti’=Td’=T Pour un D% désiré , on calcule x , ensuite on peut déterminer kp Réglage PI d’un système d’ordre n avec pôle dominant Le pôle dominant est –1/T1 c-à-d T1 4Ti =4T Une étude heuristique a montré que le choix d’un régulateur PI avec et donne des résultats satisfaisants