Download
1 / 47
470 likes | 592 Vues
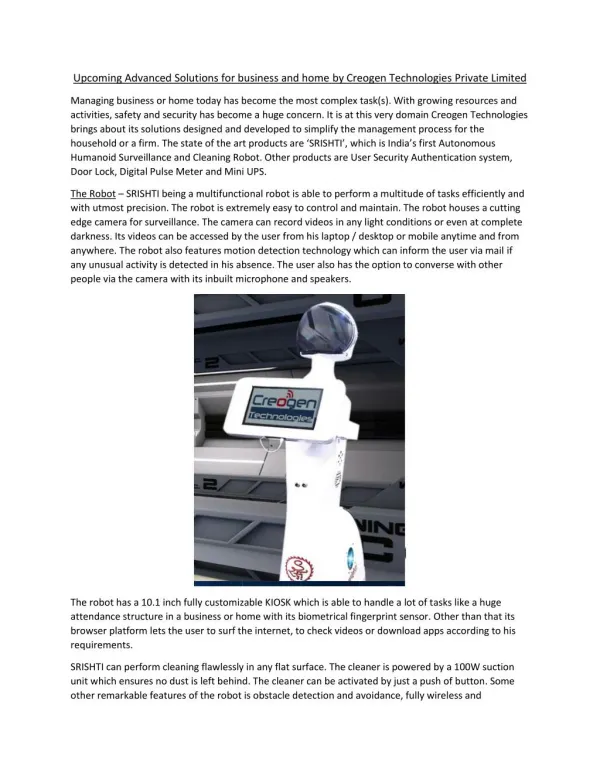
EENG-491-M03 Watchmen Final Report of Auto-Parking System. Members: DaHe Wen , Adam YiRan Huang, Crissh QiuLu Shen , Logan. Introduction.

E N D
EENG-491-M03 WatchmenFinal Report of Auto-Parking System Members: DaHeWen, Adam YiRanHuang, Crissh QiuLuShen, Logan
Introduction Auto-parking system is a system that can help people to park their cars by remote control. As we all known ,with the development of science and technology, cars are becoming more and more common in our daily life. It becomes more and more difficult to park cars, so it is necessary to work out a system that can help people to park cars.
Potential Market this system can be used in many situations when you want to park. Because it has not been spread out, so it has a lot of profits in the future
That is whywe want to design an auto-parking system to solve this problem! If we have this auto-parking system, we can get rid of these awful situation above!
Expectation 1. Handle the signal of parking sensor 2. simulate normal in computer 3. connect the circuit successful 4. control the model well
Then we will show you a ideal demo
Process the first is about the hardware, we can use model to simulate. The most important part is the selection of sensor chip and model.
The standard of parking sensor: 1.Should have the reversing radar display, audible alarm, regional alerts and location instructions 2.The detection range should between 0.3m to 1.5m 3. The cost should not be too expensive
1.The warning distance test 2.The obstacle location display test 3.The detection dead angle test We have to do three tests:
Then we will select modelsat first we want to get toy cars
There is no place to set up sensors Can not change the direction obviously Then we find two problems
The second is simulating the process of the auto-parking system. This is also quite an important part of this project!
The formula is We should use applet to do the simulation
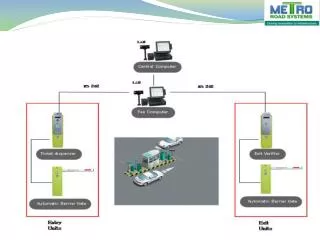
The third is designing the control system of the auto-parking system. This is the core part of this project!
1.Get the signal of parking sensor 2. Understand how the computer get the feedback 3. When should the robot rotate What we want to realize is
The signals of parking sensor are divided into two situations We have measured that
When the distance is bigger than 0.3m
When the distance is smaller than 0.3m
So we need amplifier to magnify the current
Because we need to switch the circuit, so the electromagnetrelay is also needed.
then the system will get the feedback and calculation
Next the system will give the command to circuit and let it rotate
Because the response time from the sensor is so long, so we have failed many times, the sensor is not in good use as we thought. But our budget is limited, so we can not get a more sensitive sensor. Realistic constraints
Conclusion Because it is just a test experiment, so there are lots of problems existing: the voltage is unstable, the wire connection is broken, the signal of remote control is blocked, etc. We have failed many times, but sometimes we still find that the robot can do the rotation when it gets close to obstacles. That proved we can use the sensor’s signals and give commands to the robot.
If you want to know more, please take a focus on our website: http://iris.nyit.edu/~yhuang21/
Appendix : • Integral steering linkage formula