Download
1 / 23
230 likes | 338 Vues
Obserwowalność. System dyskretny. System ciągły. u – wejścia y – wyjścia x – stany.

E N D
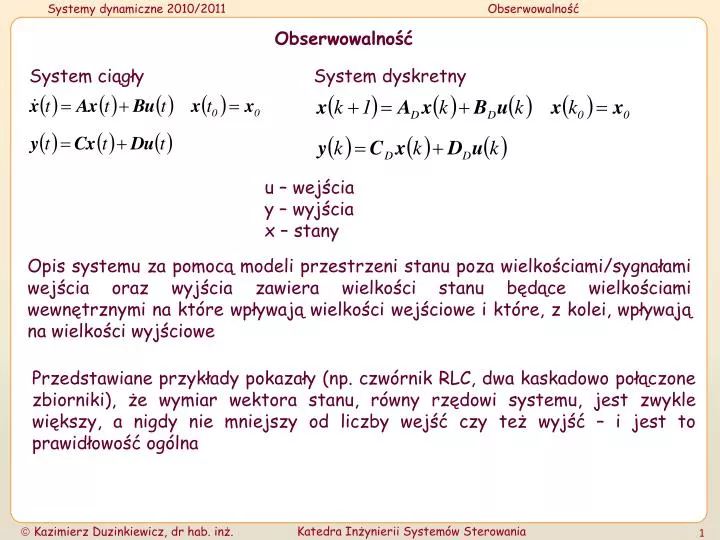
Obserwowalność System dyskretny System ciągły u – wejścia y – wyjścia x – stany Opis systemu za pomocą modeli przestrzeni stanu poza wielkościami/sygnałami wejścia oraz wyjścia zawiera wielkości stanu będące wielkościami wewnętrznymi na które wpływają wielkości wejściowe i które, z kolei, wpływają na wielkości wyjściowe Przedstawiane przykłady pokazały (np. czwórnik RLC, dwa kaskadowo połączone zbiorniki), że wymiar wektora stanu, równy rzędowi systemu, jest zwykle większy, a nigdy nie mniejszy od liczby wejść czy też wyjść – i jest to prawidłowość ogólna
Podane spostrzeżenie jest odbiciem faktu, że złożoność realnego świata zwykle wyklucza możliwość bezpośredniego oddziaływania na każdą wielkość stanu lub obserwowania każdej wielkości stanu Tym nie mniej, jesteśmy często zainteresowani w estymowaniu wektora stanu, który charakteryzuje złożoność działania wewnętrznych mechanizmów systemu Obserwowalność określa możliwość jednoznacznego określenia stanu początkowego systemu w oparciu pomiary przez skończony przedział czasu sygnałów wejścia i wyjścia Znaczenie: znajomość stanu początkowego i wejścia systemu pozwala zrekonstruować całą trajektorię stanu w oparciu o równania stanu
Systemy ciągłe Obserwowalność stanu Stan obserwowalny Stan systemu liniowego jest obserwowalny jeżeli można go określić znając wyjście dla chwil ze skończonego przedziału, Jeżeli każdy stan jest obserwowalny, mówimy, że system jest całkowicie obserwowalny lub krócej obserwowalny
Obserwowalność systemu ciągłego liniowego stacjonarnego System liniowy stacjonarny jest obserwowalny wtedy i tylko wtedy, gdy macierz obserwowalności, nazywana macierzą obserwowalności Kalmana ma rząd n, tzn. rząd systemu
Wymiar macierzy sterowalności: npxn; n – wymiar stanu, p – wymiar wyjścia Dla p=1 macierz obserwowalności jest macierzą kwadratową i dla sprawdzenia obserwowalności wystarczy sprawdzić nieosobliwość macierzy obserwowalności
Ilustracja związków sterowalności i obserwowalności systemów ciągłych oraz ich stabilności Przykład 1. Rozważmy system SISO Policzmy macierz tranzycji Przyjmijmy zerowe warunki początkowe i skokowe wejście poza tym
Korzystając z macierzy tranzycji możemy policzyć odpowiedź stanu
ale odpowiedź stanu wykazuje niestabilność Złe zachowanie stanu zostało „ukryte” na wyjściu – nie jest widoczne na wyjściu
Zbadajmy obserwowalność systemu Mamy n=2, p=1 oraz Zatem System jest nieobserwowalny
Przykład 2. Rozważmy system SISO Sprawdzimy obserwowalność systemu Mamy n=2, p=1 oraz
Zatem System jest obserwowalny Policzmy macierz tranzycji
która pozwoli przyjmując zerowe warunki początkowe i skokowe wejście ustalić odpowiedź stanu i odpowiedź wyjścia poza tym
Zarówno odpowiedź stanu i odpowiedź wyjścia przy t jest ograniczona (stabilizuje się)
Zmieńmy warunek początkowy i wyznaczmy odpowiedź stanu i wyjścia
Ponieważ system jest obserwowalny, system powinien „wyczuć” tą zmianę. Odpowiedzi stanu i wyjścia pokazują niestabilność Odpowiedź stanu Odpowiedź wyjścia
Sprawdźmy sterowalność i osiągalność systemu Mamy n=2, p=1 oraz Zatem System jest niesterowalny - nieosiągalny
Przykład 3. Rozważmy system SISO Zbadajmy jego sterowalność i obserwowalność Mamy n=2, p=1
Zatem System jest sterowalny System jest obserwowalny
Do samodzielnego rozwiązania: • zbadać stabilność stanu i wyjścia • wyznaczyć odpowiedź systemu dla zerowego warunku początkowego i wymuszenia poza tym Przedyskutować wyniki
Systemy dyskretne Obserwowalność stanu Stan obserwowalny Stan systemu liniowego jest obserwowalny jeżeli można go określić znając wyjście dla chwil ze skończonego przedziału, Jeżeli każdy stan jest obserwowalny, mówimy, że system jest całkowicie obserwowalny lub krócej obserwowalny
Obserwowalność systemu dyskretnego liniowego stacjonarnego System liniowy stacjonarny jest obserwowalny wtedy i tylko wtedy, gdy macierz obserwowalności, nazywana macierzą obserwowalności Kalmana ma rząd n, tzn. rząd systemu
