Download
1 / 1
10 likes | 144 Vues
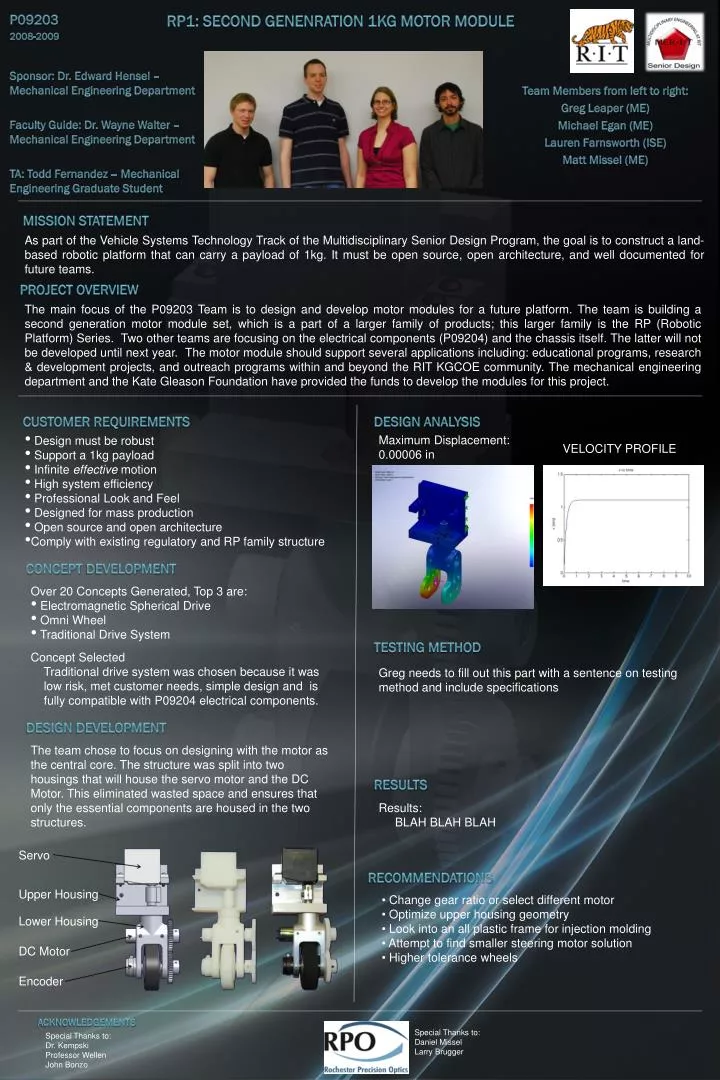
Sponsor: Dr. Edward Hensel – Mechanical Engineering Department Faculty Guide: Dr. Wayne Walter – Mechanical Engineering Department TA: Todd Fernandez – Mechanical Engineering Graduate Student. Team Members from left to right: Greg Leaper (ME) Michael Egan (ME) Lauren Farnsworth (ISE)

E N D
Sponsor: Dr. Edward Hensel – Mechanical Engineering Department Faculty Guide: Dr. Wayne Walter – Mechanical Engineering Department TA: Todd Fernandez – Mechanical Engineering Graduate Student Team Members from left to right: Greg Leaper (ME) Michael Egan (ME) Lauren Farnsworth (ISE) Matt Missel (ME) MISSION STATEMENT As part of the Vehicle Systems Technology Track of the Multidisciplinary Senior Design Program, the goal is to construct a land-based robotic platform that can carry a payload of 1kg. It must be open source, open architecture, and well documented for future teams. P09203 2008-2009 Project overview The main focus of the P09203 Team is to design and develop motor modules for a future platform. The team is building a second generation motor module set, which is a part of a larger family of products; this larger family is the RP (Robotic Platform) Series. Two other teams are focusing on the electrical components (P09204) and the chassis itself. The latter will not be developed until next year. The motor module should support several applications including: educational programs, research & development projects, and outreach programs within and beyond the RIT KGCOE community. The mechanical engineering department and the Kate Gleason Foundation have provided the funds to develop the modules for this project. Customer requirements Design Analysis • Design must be robust • Support a 1kg payload • Infinite effective motion • High system efficiency • Professional Look and Feel • Designed for mass production • Open source and open architecture • Comply with existing regulatory and RP family structure Maximum Displacement: 0.00006 in VELOCITY PROFILE RP1: Second GenENRATION 1KG Motor Module Concept development • Over 20 Concepts Generated, Top 3 are: • Electromagnetic Spherical Drive • Omni Wheel • Traditional Drive System • Concept Selected • Traditional drive system was chosen because it was • low risk, met customer needs, simple design and is • fully compatible with P09204 electrical components. TESTING METHOD • Greg needs to fill out this part with a sentence on testing method and include specifications Design development The team chose to focus on designing with the motor as the central core. The structure was split into two housings that will house the servo motor and the DC Motor. This eliminated wasted space and ensures that only the essential components are housed in the two structures. Results Results: BLAH BLAHBLAH Servo Recommendations Upper Housing • Change gear ratio or select different motor • Optimize upper housing geometry • Look into an all plastic frame for injection molding • Attempt to find smaller steering motor solution • Higher tolerance wheels Lower Housing DC Motor Encoder Acknowledgements Special Thanks to: Daniel Missel Larry Brugger Special Thanks to: Dr. Kempski Professor Wellen John Bonzo