Download
1 / 4
40 likes | 184 Vues
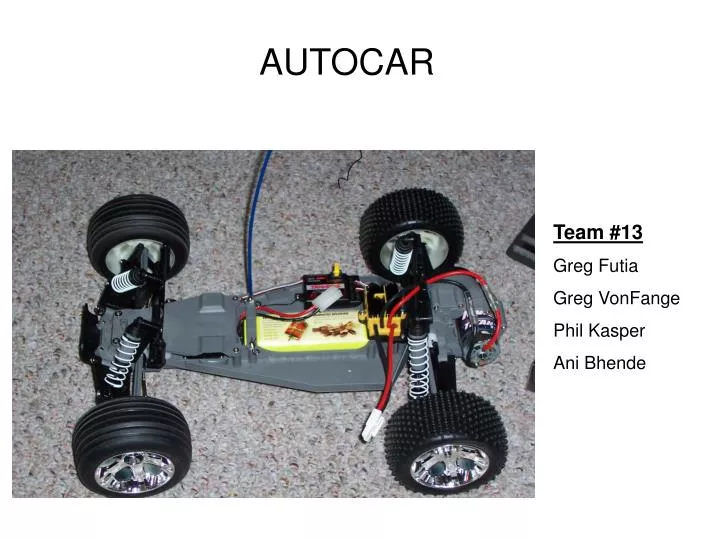
AUTOCAR. Team #13 Greg Futia Greg VonFange Phil Kasper Ani Bhende . Motor Control Interfacing. 20 mS period 5% to 10% duty cycle range Identical signal for Electronic Speed Controller (ESC) and steering servo If PWM used maximum processor frequency is ~1 MHz

E N D
AUTOCAR Team #13 Greg Futia Greg VonFange Phil Kasper Ani Bhende
Motor Control Interfacing • 20 mS period • 5% to 10% duty cycle range • Identical signal for Electronic Speed Controller (ESC) and steering servo • If PWM used maximum processor frequency is ~1 MHz • Servo control will be realized with Timer module to relieve speed constraint • Need for optical isolating circuitry to prevent feedback from motors
Current Draw -Power options are limited to available RC batteries which range from 7.2 – 8.2 V 3300 mAh to 4400 mAh.