Download
1 / 21
210 likes | 318 Vues
Student research project Phoenix-3. NOISEPROOF EDGE DETECTOR ON BASE OF NEURON NET. Alex Astapkovitch, Head of the Student Design Cent er State University of Aerospace Instrumentation Saint-Petersburg,Russia 2010. STUDENT RESEARCH PROJECTS “Phoenix-X” HISTORY. Real robots: PHOENIX-X.

E N D
Student research project Phoenix-3 NOISEPROOF EDGE DETECTOR ON BASE OF NEURON NET Alex Astapkovitch, Head of the Student Design Center State University of Aerospace Instrumentation Saint-Petersburg,Russia 2010
STUDENT RESEARCH PROJECTS “Phoenix-X” HISTORY Real robots: PHOENIX-X • - Distant • immobilizer; • Video • system; Virtual robots: Neuron net Noise proof Edge Detector SOFA-2009 Virtual robot benchmark model 2006 - 2007 2007 - 2008 2008 - 2009 2010 - Details on site guap.ru/english version/student design center
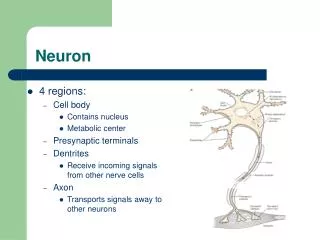
PHOENIX-X PHILOSOPHY - The strategic goal of the “Phoenix-X” projects is a developing of the understanding of the supervised learning for the control system on base of a neuron net. LEGEND OF PHOENIX-3 PROJECT: Autonomic robot Phoenix-3 is designing to be able to patrol the determined area with the purpose of detection the centers of the flame. In case of the flame detection the robot should come nearer and use the onboard fire extinguisher to eliminate flaming. For orientation the video shock-proof camera with the rotary mechanism and a zoom lens is supposed to be used. • Vision system is necessary part of most modern robot ; • Edge detector is a part of robot vision system ;
LAPLAS EDGE FILTER CLEAN IMAGE “DOG AND BALL” FILTERED 0 -1 0 -1 4 -1 0 -1 0 NOISY IMAGE (UNIFORM NOISE MODEL )
Piecewise linear activation function F(x) S1 (S,W) S1 S2 S3 S4 S5 S6 S7 S8 S9 S2 SNSEN 1 THmin THmax FRAME CONCEPT OF THE NEURON FILTER FILTER RESi,j GLOSSARY - “ LEARNING” stands for the procedure of the determination meanings of weight vector W and thresholds of activation function ; “SUPERVISED LEARNING“ stands for LEARNING with set of “SAMPLES” ; - SAMPLE is pair of frames: RAW FRAME and RESULTING FRAME ;
ONE STEP SUPERVIZED LEARNING PROCEDURE S1(0,0) S2(0,0) S1(0,1) S2(0,1) ................. 1 ……………………………….. S1(i,j) S2(i,j ) Snsen(i,j) 1 ………………………………… F(0,0) F(0,1) ….. ……… F( i,j) ……… w1 w2 wnsen+1 = * S * W = F - the bad posed problem for W S - rectangular matrix, formed from RAW sample, F - sample vector ; W - unknown neuron filter weight vector ; Tichonov regularization provides stable solution min F(w) = (SW - F, SW – F) + (W,W) w Weights calculation is one step procedure : W = (ST S + E) –1 ST F
S = F = S1 F1 S2 F2 Sample_1 :S1 F1 Sample_2 : S2 F2 W1 = (S1T S1 + E) –1 * S1T F1 ONE SAMPLE LEARNING W2 = (S1T S1 + S 2T S2 + E) –1 * (S1T F1+S2T F2) TWO SAMLE LEARNING MULTISAMPLE LEARNING PROCEDURE ONE STEP WEIGHT CALCULATION PROCEDURE W = (ST S + E) –1 ST F TWO SAMPLE CASE MULTISAMPLE LEARNING Let us introduce : Sek = ∑ SkTSk- experience matrix for k samples Fek = ∑ SkTFk - experience vector for k samples Wk+1 = (Sek + S k+1T Sk+1 + E) –1 * (Fek+Sk+1T Fk+1)
LEARNING WITH HEURISTIC SAMPLE_1 RAW FRAME RESULTING FRAME is LAPLAS FILTERING OF RAW FRAME 0 0 0 0 0 0 0 0 -200 -200 -200 -200 0 -200 400 200 200 200 0 -200 200 0 00 0 -200 200 0 0 0 0 -200 200 0 0 0 50 50 50 50 50 50 50 50 50 50 50 50 50 50 250 250 250 250 50 50 250 250 250 250 50 50 250 250 250 250 TEST OF THE LEARNING PROCEDURE RAW FRAME : NOISY_REC1 RES FRAME : LAPLAS FILTERED NOISY FRAME • 100*100 bmp artificially formed sample was used; • 10th sensor of constant part was added;
NEURONLIKE LAPLAS EDGE FILTER CLEAN AND NOISY BMP IMAGE “DOG AND BALL” • - UNIFORM NOISE MODEL ; • NOISE AMPLITUDE 60 ; • DOG BODY AMPLITUDE 150 ; THmin = 60 THmin = -20 NEURONLIKE LAPLAS EDGE FILTER WITH THRESHOLDS FILTERING WITH PURE LAPLAS
Due to symmetry conditions • - 3*3 neuron filter has the 3 free weights • 5*5 neuron filter has the 3+3 = 6 free weights • 7*7 neuron filter has the 6+4 = 10 free weights NEURON “LINEAR” FILTER LEARNING WHAT LENGTH OF FILTER HAS TO BE USED ? WHAT THE SAMPLE SET HAS TO BE USED ? • HAND MADE BORDER WITH • REGULATED THICNESS (here is 2); • LAPLAS, SOBEL, CANNY FILTERED • BORDERS ; HOW MUCH SAMPLES HAVE TO BE USED? • Rectangular, cycles …….? ; • Mixed set of samples …..?
Experiments with supervised earning SAMPLES SET NOISY FRAMES LAPLAS BORDERS HAND MADE BORDERS • 5*5 neuron is learned with • different samples; • neuron filter is tested with • noisy ”DOG AND BALL” ; • low threshold is selected • by “hand” ;
NUMERICAL EXPERIMENTS - I • HAND MADE BORDER WITH THICKNESS 2 WERE USED; • REC and REC+BALL LEARNING SETS WERE USED; • WEIGHT VECTOR TRANSFORMATION TO FILTER MASK : TEST FIGURE (CLEAN AND NOISY) FILTERED WITH NEURON (TR min = 50) CLEAN : H51 H52 NOISY: H51 H52 CONCLUSION: PERFOMANCE OF FILTER LEARNED WITH TWO SAMPLES IS BETTER.
NUMERICAL EXPERIMENTS - II • LAPLAS FILTERED BORDER WERE USED; • REC and REC+BALL LEARNING SETS WERE USED; • WEIGHT VECTOR TRANSFORMATION TO FILTER MASK : TEST FIGURE (CLEAN AND NOISY) FILTERED WITH NEURON (TR min = 65) CLEAN : L51 L52 NOISY: L51 L52 CONCLUSION: IT IS POSSIBLE TO “STEAL” HEURISTIC ALGORITHM THROUGH LEARNING.
TRmin=30 TRmin=40 TRmin=40 NUMERICAL EXPERIMENTS - III • HAND MADE BORDER WITH THICKNESS 1 WERE USED; TEST FIGURE (CLEAN AND NOISY) FILTERED WITH NEURON CLEAN : H51 NOISY: H51 H52 CONCLUSION: MEAUSURE OF QUALITY OF FILTERING HAS TO BE INTRODUCED.
Learning asymmetry effect • Learning asymmetry effect was discovered with SOFA-2009 model • for the robot cruise neurocontroller ; • In sense of neuron edge detector effect results in the asymmetry • of the weight values of the weights with the symmetry position ; • Norm of the weight asymmetry can be introduced that can be • used for estimation of quality of learning; ONE SAMPLE LEARNING TWO SAMPLE LEARNING CONCLUSIONS : IT IS POSSIBLE TO CONTROL FILTER QUALITY WITH SOME ASSYMETRY NORM.
Modified One Step Learning Procedure - I • The one possible way to solve asymmetry problem is using the description of the relation between the weights in explicit form; • For learning asymmetry there are exist linear relation between the weights at the symmetry position in filter matrix; • One step learning procedure on base of Lagrange multipliers provides possibility to take into account the existence of the linear relations for weights and avoid asymmetry effects also; • This procedure was tested with SOFA-2009 model ;
Modified One Step Learning Procedure - II • Learning asymmetry problem can be solved if one take into account the linear relations between weights W(k,i) = W(m,n) • In common way the set of this relations can be presented as Nsym symmetry conditions, expressed in matrix form L W = b • Lagrange multipliers method for one step learning procedure can be formulated as linear programming optimization problem: min F(W) = (SW - F, SW – F) + (W,W) + Dμ (LW-b) W,Dμ
Sμ= E 0 S L Eμ = 0 0 LT 0 Modified One Step Learning Procedure - III • Let us μ is the vector that is formed from Lagrange multipliers • μ = [μ1, μ2, ……. μ Nsym ]T • For modified vectors and matrixes • Wμ = [ W μ]T • Fμ = [ F b]T • Solution is a vector • Wμ= (SμTSμ+ Eμ)-1SμTFμ CONCLUSIONS : IT IS POSSIBLE TO PROVIDE SYMMETRY OF FILTER WITH THE LAGRANGE MYLTIPLIERS METHOD AND THE SAME LEARNING PROCEDURE.
STANDART REAL IMAGE TEST • NEURON FILTER 5*5 LEARNED WITH : • - TWO LAPLAS BORDERS SAMPLES; • - TWO HAND MADE BORDERS WITH THICNESS 2; • LOW THRESHOLDS WAS 30 and 60 ; LEARNING WITH 2 HAND MADE BORDERS LEARNING WITH LAPLAS FILTERED BORDERS CONCLUSION: FILTER PERFOMANCE IS EXELENT.
CONCLUSIONS • PROPOSED APROACH IS EXTREMELY FLEXIBLE AND PROVIDES POSSIBILITY TO GENERATE THROGHT LEARNING A VARIETY OF FILTERS : LINEAR,NONLINEAR, LOCAL, DISTRIBUTED AND SO ON; • IT IS POSSIBLE TO USE AN VARIETY OF EXISTING FILTERS AS LEARNING SAMPLE SET; • SOME WORK HAS TO BE DONE;
Supporting publications • Astapkovitch A.M. Learning Asymmetry Effect for the Neuron Net Control Systems. Proc. International forum “Modern information society formation – problems, perspectives,innovation approaches ”, p.7-13,SUAI Saint-Petersburg,June 6-11, 2009 2. Astapkovitch A.M. Virtual mobile robot SOFA-2009 Proc. International forum “Information and communication technologies and higher education - priorities of modern society development”, p.7-15,SUAI Saint-Petersburg, 2009 • Astapkovitch A.M. Оne step learning procedure for neural net control system. Proc. International forum “Information systems. Problems, perspectives , innovation approaches” , p.3-9,SUAI Saint-Petersburg, 2007 • http://guap.ru > english version > student design center > student projects > SOFA-2009 and publications AND FAREWELLS I LEAVED SUAI AND NOW IS WORKING FOR “LANIT-TERCOM” COMPANY THAT IS ROOTED TO STATE SAINT-PETERSBURG UNIVERSITY MATH-MECH FACULTY. THANK FOR ALL PHOENIX-X STUDENT RESEARCH PROJECTS TEAMS OF DIFFERENT YEARS. AND I HOPE THAT YOU REMEMBER THE PHOENIX BIRD LEGEND. Sincerely yours : tatalex2@gmail.com