Download
1 / 35
350 likes | 455 Vues
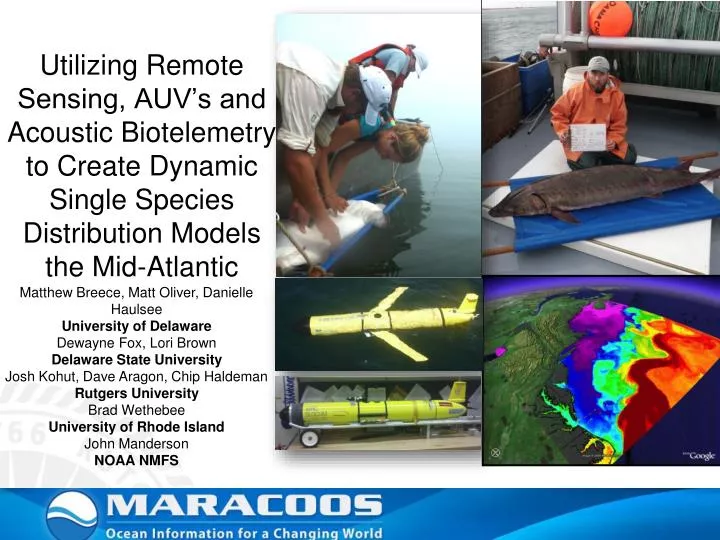
Utilizing Remote Sensing, AUV’s and Acoustic Biotelemetry to Create Dynamic Single Species Distribution Models the Mid-Atlantic. Matthew Breece, Matt Oliver, Danielle Haulsee University of Delaware Dewayne Fox, Lori Brown Delaware State University

E N D
Utilizing Remote Sensing, AUV’s and Acoustic Biotelemetry to Create Dynamic Single SpeciesDistribution Models the Mid-Atlantic Matthew Breece, Matt Oliver, Danielle Haulsee University of Delaware Dewayne Fox, Lori Brown Delaware State University Josh Kohut, Dave Aragon, Chip Haldeman Rutgers University Brad Wethebee University of Rhode Island John Manderson NOAA NMFS
Large range Anadromous Broad coastal movements Vulnerable to impacts During migrations Over exploited Atlantic Sturgeon
Project Significance • Limited understanding of adult movements • Migration routes and timing • Environmental drivers • Increased understanding will help reduce impacts • Fisheries • Shipping traffic • Habitat degradation • Establish a quantitative link between ocean conditions and occurrence
Methods • 195 adults telemetered • 90 days (March-May) • 2009-2012 • ~700km net hauled • 532 captures • Mean weight 40kg • Max ~135kg and 230cm FL
Delaware River Receivers • 42 Receivers • C & D Canal - Trenton, NJ
Distribution of Spawning Atlantic Sturgeon 2009 2010 2011
Contribution to Model Salt front Mixed reworking
Training Model Philadelphia Chester, PA Wilmington, DE N C & D Canal 10km
Historic • MaxEnt • Similar estimates • Shows capabilities of the model
Projections Philadelphia Chester, PA Wilmington, DE N C & D Canal Historic Drought Current Future 10km
Passive Receiver Array • > 150 Stationary Receivers • Our focus • Delaware Bay • Atlantic Ocean
Atlantic Sturgeon Maximum Likelihood Model • Matching detections with SST • Delaware Bay/Coastal ocean detections • 2009-2011 • Developed Maximum Likelihood model to estimate presence on basis of SSTs • Extrapolate data • Areas lacking receiver coverage Sea Surface Temperature
Maximum Likelihood Model • Telemetry/SST inputs • Estimate mean and standard deviation • Model Fitting • Strong seasonal component • Included a time dependent negative cosine (seasonal cycle)
Moving Forward • Expand coverage • Include ACT data • Additional years • Increase factors • Derived from Satellites • Salinity • Chlorophyll • Dissolved organics • Add East/West component
Test Run November 2011 on RU15 • Mission run from Tuckerton, NJ to Chincoteague, VA • Telemetry data • Temperature • Salinity • Productivity • Found 4 sturgeon • All in the same water mass
Understanding of Movements • Link movements to oceanographic conditions • Determine patterns/associations • Identify important water properties/types • Facilitate Management • Minimize incidental take of Endangered Species • Not only helps sturgeon but allows fisheries to keep fishing • Enables more efficient management • Limit the impact on fisheries
OTIS (Oceanographic Telemetry Identification Sensor) • Autonomous Underwater Vehicle (AUV) • Teledyne/Webb Research G2 Slocum Electric Glider • Acoustic Integration!
Mission Plan • Zig-zag the coastal ocean • Measure in situ oceanographic conditions • Monitor in near-real time for acoustic transmitters associated with telemetered fish • Focus efforts on areas with high concentrations of telemetered fish
Mission • October 5th – 23rd 2012 • 337km traveled • On-the-fly mission changes when fish are detected
Atlantic Sturgeon (4) Sand Tiger Sharks (25)
Further proof of concept: • AUVs are an effective tool for detecting telemetered fish in more remote locations • Real time data observing allows for on-the-fly mission changes to adapt to oceanic conditions and presence of fish • Science data collected by glider allows us to begin to make associations between the vertical structure of water column and the presence of different fish species.