Download
1 / 20
210 likes | 755 Vues
Balanced Graph Partitioning. Konstantin Andreev Harald R ä cke. k - balanced graph partitioning. G=(V,E). Motivation. Parallel Computing VLSI design Sparse Linear System Solving. Problem Definition.

E N D
Balanced Graph Partitioning Konstantin Andreev Harald Räcke
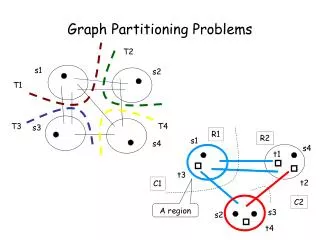
k - balanced graph partitioning G=(V,E)
Motivation • Parallel Computing • VLSI design • Sparse Linear System Solving
Problem Definition • For a graph G=(V,E) we call a partitioning P, -balanced if V is partitioned into k disjoint subsets each containing at most vertices. • Denote with cost(P) the capacity of edges cut by the partitioning P • Find the minimum cost -balanced graph partitioning
Related Work • Even et al. showed that any (k,)-balanced partitioning with > 2 can be reduced to a (k’,1+) where · 1. • Furthermore they gave a O(log n) bicriteria approximation for the (k, 2)-balanced partitioning problem. • Feige and Krauthgamer gave a O(log2 n) approximation for minimum bisection, i.e. the (2,1)-balanced graph part.
Our Results • We prove that (k,1)-balanced part. is inapproximable within any finite constant unless P=NP • We present a O(log2 n/4) factor bicriteria approximation for the (k,1+)-balanced graph part. problem
3-Partition A a1 a2 a3 a4 a5 a6 a7 a8 a9
Hardness Result • 3-Partition problem: Given a1,a2, ..,a3k integers, a threshold A s.t. A/4<ai<A/2 and ai = kA, decide if the numbers can be partitioned into triples so that every triple sums up to exactly A. • This problem is strongly NP-complete, i.e. it is NP-complete even if all ai and A are polynomialy bounded.
Reduction • Assume we can approximate (k,1)-balanced graph part. within a finite factor. • For an instance of 3-Partition construct the graph G so that for every ai we have a clique of size ai and all of them are disconnected. • 3-Partition can be solved if the (k,1)-balanced graph part. algorithm can differentiate between not cutting edges and cutting at least one edge.
O(log n/) Partitions induced by T
Leighton-Rao’s (, 1-) – separation algorithm Height of the tree decomposition Approximation ratio
Decomposition Tree Pruning • Observation: Tree nodes that have less than vertices or more than . graph vertices in them do not have to be considered. • Thus we are left with a forest of sub-trees all which have constant height
Dynamic Programming Algorithm • Let g1, ..,gt denote the number of sets of different sizes that are used in the clustering of T1, .., Ti -1. • If g1, ..,gt is infeasible then • Otherwise
Running Time • Dynamic programming table has entries. • To decide whether g1, ..,gt is feasible takes time. • To compute the minimum in the recursion over all partitionings of Ti takes constant time. • The separation algorithm takes time.
Future Work • Solve the generalized problem when different partitions are required to have different sizes. • Improve the dependence on 1/ of the approximation ratio or the running time. • Improve the approximation ratio.