Download
1 / 41
410 likes | 572 Vues
Operations Research im Container Terminal. Agenda . Einführung Container Terminal Integrierte Planung der Containerverladung in automatisierten Terminals Ausblick und Zusammenfassung. Historische Entwicklung. 1956 Erste Vorläufer des Containerverkehrs (Malcom McLean)

E N D
Agenda • Einführung • Container Terminal • Integrierte Planung der Containerverladung in automatisierten Terminals • Ausblick und Zusammenfassung
Historische Entwicklung • 1956 Erste Vorläufer des Containerverkehrs (Malcom McLean) • Mitte der sechziger Jahre Einführung des Containers • 1967 Beginn des Containerzeitalters in Hamburg • Seit dem enorme (zweistellige) Zuwachsraten
Containerbrücke (QC) • Be- und entlädt die Container vom Schiff • Ausleger seeseitig bis ca. 60 m / landseitig ca. 15 m • Höhe: 40 m über Gleis • Z. T könne 2 benachbarte TEU´s gehoben werden
Transportfahrzeug (AGV) • Automatisch gesteuert fahrerlos • Bringt die Container vom Lagerplatz zur Containerbrücke • Keine Selbst Be- und Entladung • Alternative: sog. Straddle Carrier
Portalkräne (ASC) • Automatic stacker crane (ASC) • Die Kräne (Abb.) können sich „überfahren“
Motivation für Operations Research • Moderne Containerschiffe haben sehr hohe Betriebskosten • Liegezeiten müssen verkürzt werden bzw. die Größe der Schiffe muss sich „lohnen“ (Skalenerträge) • Bis in die 90er Jahre spielten Container in der Forschung keine große Rolle • Z. Zt. Forschungsprojekte vor allem in Europa und Asien
Containerbehandlung ./. Lagerhaltung • Container „fließen“ durchs Terminal, kurze Verweildauern (wenige Tagen - ca. 2 Wochen • Container sind individuell, eine Klassifizierung ist nicht möglich. • Container sind zeitkritischer als Waren im Lager (Fahrpläne der Schiffe) • Container sind i. d. R. größer, daher andres Equipment • Die Größe beeinflusst Planungsprobleme nicht die Eigenschaften des Equipments schon
Problem • Gibt es einen „integrierten Fahrplan“ für den Beladeprozess, der die verschiedenen Arten von (ASC´s, AGV´s und QC´s) aufeinander abstimmt? • Zielfunktion: min cmax (Minimierung des Zeitpunktes, zu dem der letzte QC seine Arbeit beendet hat).
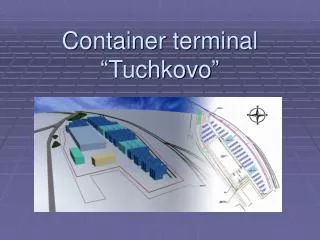
Modell des Terminals (1) • Der Stack (Lager, Puffer) benötigt den meisten Platz • in jeder Reihe des Lagerplatzes einen automatischen Portalkran (ASC) • AGV´s fahren im Uhrzeigersinn, sie dürfen nicht abkürzen und müssen nach jeden Entladevorgang den Common point passieren um dort den nächsten Auftrag zu erhalten
Modellierung des Problems • Das Laden eines Container besteht aus drei Arbeitsschritten, welche von drei verschiedenen „Maschinen“ (ASC, AGV und QC) ausgeführt werden. • n bezeichnet die Anzahl der Container • Q, S und M bezeichnet das System aus QC´s, ASC´s und AGV´s.
Abhängigkeiten der Prozessdauern • ASC: Position des Containers im Lager, Geschwindigkeit (heben, fahren, abladen) • AGV: Lagerreihe, Fahrgeschwindigkeit, Position des QC • QC: vorgesehene Position des Containers im Schiff. • Blockaden: • die AGV´s blockieren die ASC´s • die QC´s blockieren die AGV´s
Voraussetzungen • (Bemerkung 4.1) wenn es eine optimale Reihenfolge s gibt, in welcher der ASC s seine Container bearbeitet, dann gibt es auch eine optimale Reihenfolge für die Container auf den AGV´s, so dass gilt, s ist Unterreihenfolge von für alle ASC s S. • (Bemerkung 4.2) Beschränkung auf Fahrpläne, in denen Wartezeiten der AGV´s nur auftreten, wenn der ASC bzw. der QC beschäftigt sind und den Container nicht auf- oder abladen können.
Voraussetzungen (2) • (Theorem 4.1) das Problem ist NP- vollständig • (Definition 4.1) Sei ´ eine (Teil-) Reihenfolge der ersten k Jobs, so heißt ´ zulässig, wenn es mindestens ein AGV mit einer endlichen Prozessdauer im dazugehörigen Fahrplan gibt.
B&B - Suchbaum • Die Knoten im Suchbaum repräsentieren eine (Teil-)Reihenfolge • Auf der Ebene k < n repräsentiert jeder Konten eine Reihenfolge für die ersten k Jobs. • Ist diese Teilreihenfolge nach Def. 4.1 zulässig, können wir die Fertigstellungszeiten der QC´s, der ASC´s und von midestens einem AGV bestimmen.. • Der Baum hat oben viele Äste und verzweigt dann zusehends weniger bis er bei Lösungen endet.
B&B - Suchstrategie • als Strategie wird Tiefensuche verwendet • Vorteil: im Vergleich z. B. Breitensuche wird deutlich weniger Speicherplatz benötigt.
B&B - Ablauf • Ausführung des Algorithmus mehrmals nacheinander, um sich dem Optimum approximativ nähern zu können. • Die beste bis dahin gefundene (zulässige) Lösung wird mit den anderen Knoten verglichen, es werden nur solche Lösungen untersucht, deren untere Schranke um höchstens 25% von dieser bis dahin gefunden besten Lösung abweicht.
B&B – Ablauf (2) • Nach dem ersten Durchlauf berechnen wir anhand der gefundenen (besten) Lösung und dem größten Unterschied zwischen dieser Lösung und jedem erforschten Knoten eine globale untere Schranke. • Danach mehrmaliger Neustart des Algorithmus mit der gefunden Lösung als obere Schranke und Herabsetzung der Toleranz um 1%.
B&B – Ablauf (3) • Fällt die Toleranz schließlich unter 1%, wird der Algorithmus mit 0% Toleranz durchgeführt.
Untere Schranken für QC´s • Iq letzte Job auf QC, fq ist der zugehörige Fertigstellungszeitpunkt • maxq=1,2,...Q fq + i<iq piqc
Untere Schranken für ASC´s (1) • Relaxierung auf ein ein-Maschinen-Problem • Annahme: wir haben eine zulässige Teilreihenfolge der ersten k Jobs, daraus ergibt sich der Zeitpunkt (fs) an dem die ASC´s ihren letzten Job dieser Teilreihenfolge beendet haben. • Für die Folgejobs vereinfachen wir das Problem indem wir annehmen, es gibt unbegrenzte AGV-Kapazität (Ignorieren der Blockade),
Untere Schranke für ASC´s (2) • Die Unterschiede der Fertigstellungszeiten der AGV´s werden vernachlässigt, daraus ergibt sich, dass die Folgejobs durch die ASC´s ohne Leerzeit erledigt werden. • Seien 1 ... ns die Folgejobs, die vom ASC s erledigt werden, dann kann man für jeden ASC s eine untere Schranke für die gesamte Prozessdauer berechnen.
Untere Schranke für ASC´s (3) • (Theorem 5.1) Sei fs der Fertigstellungszeitpunkt des letzen Jobs von ASC s und weiter gelte o.b.d.A. 1 ... ns die Folgejobs, die in nicht wachsender Reihenfolge sortiert sind. Dann wird die Restfolge wie folgt definiert: • tiasc := piagv + piqc (tail = Restfolge) • daraus ergibt sich eine untere Schranke für cmax • maxs=1,2,...S max i=1,2,...,ns {fs + piasc + tiasc}
Untere Schranke für AGV´s (1) • mehrere identische, parallele Maschinen. • Wegen des Terminallayouts können die „Leerfahrzeiten“ (vom QC zum Common Point und weiter zum ASC) zur Prozesszeit (laden, zum QC fahren, abladen) hinzuaddiert werden, die Prozessdauer auf dem AGV ergibt sich wie folgt: • pi* := di1 + di2 + pi (für alle AGV´s gleich) • Annahme: es gibt unlimitierte ASC- und QC-Kapazitäten, d. h. es entstehen keine Wartezeiten.
Untere Schranke für AGV´s (2) • Analog zu den ASC´s definieren wir einen tail (Restfolge):tiagv := piqc • daraus ergibt sich eine untere Schranke für die AGV´s • min max1,2,...,n = (ci + fiagv) • (ci ist der Fertigstellungszeitpunkt von Job i auf seinem AGV). • Um das Minimum zu erreichen müssen die Folgejobs nach nicht wachsenden Tails sortiert werden.
Beam-Search(Abb. 2) • Heuristisches Verfahren, das auf B&B basiert • Auf jeder Ebene wird nur eine bestimmte Anzahl Knoten weiterverfolgt • Sehr schnell, da große Teile des Baums weggeschnitten werden,
BS - Auswertungsfunktion • Es werden für alle Knoten auf der Ebene k die unteren Schranken wie beim B&B berechnet. Von diesen zeigt der größte Wert, wie „effektiv“ die ersten k Jobs geplant wurden. • Die zugehörige obere Schranke entspricht dem tatsächlichen Wert, den wir erhalten, wenn wir die Heuristik für die obere Schranke anwenden. Wie beim B&B halten wir uns an die beste Lösung, die wir bis dahin gefunden haben. Übersteigt eine untere Schranke den Wert der bis dahin besten Lösung können wir diesen Knoten untersuchen.
BS – Auswahl der Knoten • Auf jeder Ebene des Baums werden aus allen Knoten die „viel versprechendsten“ausgewählt. Alternative: bestimme von jedem Vater höchstens ein Kind (disjunkte Knoten). • Eine große Beamweite liefert nicht zwangsläufig bessere Ergebnisse als eine kleine. • In Tests hat sich gezeigt, dass „poolen“ bessere Ergebnisse, als disjunkte Knotenabkömmlinge liefert.
BS - Filterung • Um die Anzahl der zu untersuchenden Knoten zu begrenzen, werden auf der Ebene k die Jobs nach nicht wachsenden Restfolgen tiagv sortiert. Ein Job mit kleinem tiagv wird vom QC zum „Schluss“ bearbeitet und würde ein AGV für längere Zeit blockiert. • Filtermechanismus: Lege nur einen Branch für die Jobs mit den größten tiagv an. (Anzahl = Filterweite) • Filterung macht den Algorithmus schneller. • Im Vergleich zum ungefilterten Algorithmus kann die Qualität der Lösung schlechter werden.
Rechnerexperimente • Sowohl der B&B, als auch der Beam-Search-Algorithmus wurden mittels einer detaillierten Simulation getestet. • Anzahl/Geschwindigkeit der AGV´s/ASC´s werden variiert • Die QC´s werden manuell bedient, daher lassen sie sich nicht beschleunigen
Ergebnisse des B&B (Tabelle 1) • Ist die Abweichung (Spalte 7) größer 0, hat der Algorithmus nach der Untersuchung von mehr als 1*105 Knoten terminiert. • Rechenzeit variiert ebenso wie die Abweichung der unteren Schranke zur gefunden Lösung
BS – (Abb. 3)durchschnittliche und maximale Abweichung zwischen Beam- und Filterweite zur besten Beam- und Filterweite
BS – (Abb. 4)Auswirkung auf die Rechenzeit bei steigender Filterweite für feste Beamweiten
BS - Ergebnisse • Beam- und Filterweite (bw + fw) beeinflussen die Qualität der Lösung wenig. • große bw und fw haben Einfluss auf die Rechenzeit • Der Algorithmus ist sehr robust
Vergleich der Ergebnisse von B&B und BS (Tab. 3) • Beam-Search mit einer erlaubten Rechenzeit von höchstens 30 Sekunden. • Ergebnisse sind vergleichbar, machmal ist der BS sogar besser. • B&B benötigt z. T. 10 – 20 mal mehr Rechenzeit als BS
Zusammenfassung/Ausblick • Die effektive Planung spart Liegezeit der Schiffe und erhöht die Produktivität des Terminals. • Effektive untere Schranken • Effektive und robuste Lösungsverfahren • Zukünftig: dynamische Einflüsse, Integration der landseitigen Vorgänge...
Verwendete Literatur • Meersmans/Wagelmans: „Effective algorithms for integreted scheduling of handling equipment at automated container terminals“ Rotterdam 2001 • Meersmans/Dekker: „OR supports container handling, Rotterdam 2001 • Bilder: HHLA, CTA,